Področje in uporaba strojnega vida za namene industrijske avtomatizacije in robotizacije je v zadnjih letih v porastu. Načrtovalci proizvodnih linij se vedno bolj pogosto odločajo za strojni vid namesto namenskih perifernih naprav za ponovljivo pozicioniranje obdelovancev, zajem podatkov in nadzor nad samo kvaliteto proizvodnega procesa.
 S pomočjo strojnega vida se lahko cene avtomatizacije v proizvodnji precej zmanjšajo in povečajo fleksibilnost proizvodnih linij, k čemur prispeva tudi integracija robotskih sistemov v proces.
S pomočjo strojnega vida se lahko cene avtomatizacije v proizvodnji precej zmanjšajo in povečajo fleksibilnost proizvodnih linij, k čemur prispeva tudi integracija robotskih sistemov v proces.
Algoritmi, ki skrbijo za zajem in obdelavo slik, postajajo vedno bolj kompleksni in hitrejši, kar je predvsem posledica naglega razvoja vgrajenih sistemov. Strojni vid postaja prav zaradi hitrejše implementacije vedno bolj prijazen do uporabnika, prav tako pa večina podpira komunikacijo preko širokopasovnih Ethernet omrežij. S tem lahko podjetja razvijejo kompleksne sisteme za nadzor proizvodnje linije, sledenje kvaliteti izdelkov ter menjave obdelovancev. Če povežemo v omrežje še robote, pa lahko praktično nadzorujemo celotno proizvodno linijo iz domačega naslonjača.
Aplikacija
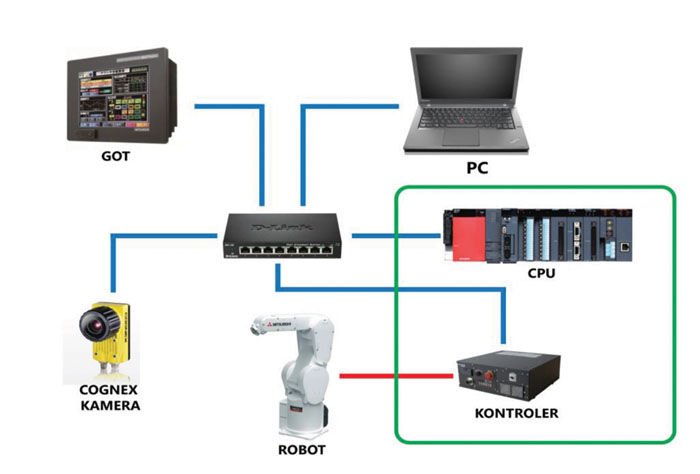
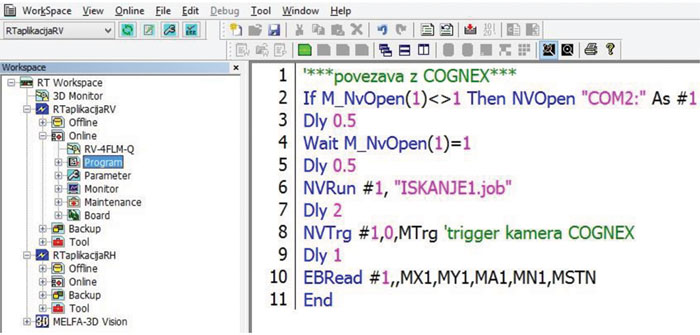 Za prikaz in demonstracijo delovanja strojnega vida v celici z robotom je uporabljena kamera proizvajalca Cognex, krmilnik, robot ter operaterski panel pa so Mitsubishijevi. Vse tri naprave že v osnovni podpirajo vedno bolj popularno Ethernet komunikacijo. Integracija različnih naprav oziroma sistemov, da delujejo medsebojno kot en sistem in omogočajo vse funkcije, ki jih posamezna naprava ponuja, je velikokrat lahko problematična, zlasti če ne moremo za celotno aplikacijo zagotoviti opreme istega proizvajalca. Tu ponavadi govorimo o kompleksnih sistemih in če nimamo iz strani proizvajalcev zagotovljene neke osnovne kompatibilnosti med opremo, se nam lahko sama izvedba aplikacije časovno bistveno podaljša in podraži. Zato je trenutni trend, da se veliko proizvajalcev različne opreme medsebojno povezuje. Tako kar naenkrat dobimo večjo izbiro naprav različnih podjetij, ki so medsebojno podprte. Enako je to pri navezi Cognex Mitsubishi, kjer je že poskrbljeno za skladnost orodij in nabora funkcij, ki jih posamezna naprava podpira. Denimo pri programskem jeziku Melfa Basic V, ki se uporablja za programiranje robota, so že v naprej pripravljeni ukazi za delo s kamerami Cognex, prav tako pa tudi kamera skrbi za to, da so podatki, ki so poslani na robotski krmilnik pravilno interpretirani s strani robota. Kamera tudi podpira funkcijo pošiljanja zajetih slik na operaterski panel Mitsubishi GOT. Na ta način lahko sprotno na liniji pregledujemo zajete slike in delamo korekcije brez večjih zastojev proizvodnje linije.
Za prikaz in demonstracijo delovanja strojnega vida v celici z robotom je uporabljena kamera proizvajalca Cognex, krmilnik, robot ter operaterski panel pa so Mitsubishijevi. Vse tri naprave že v osnovni podpirajo vedno bolj popularno Ethernet komunikacijo. Integracija različnih naprav oziroma sistemov, da delujejo medsebojno kot en sistem in omogočajo vse funkcije, ki jih posamezna naprava ponuja, je velikokrat lahko problematična, zlasti če ne moremo za celotno aplikacijo zagotoviti opreme istega proizvajalca. Tu ponavadi govorimo o kompleksnih sistemih in če nimamo iz strani proizvajalcev zagotovljene neke osnovne kompatibilnosti med opremo, se nam lahko sama izvedba aplikacije časovno bistveno podaljša in podraži. Zato je trenutni trend, da se veliko proizvajalcev različne opreme medsebojno povezuje. Tako kar naenkrat dobimo večjo izbiro naprav različnih podjetij, ki so medsebojno podprte. Enako je to pri navezi Cognex Mitsubishi, kjer je že poskrbljeno za skladnost orodij in nabora funkcij, ki jih posamezna naprava podpira. Denimo pri programskem jeziku Melfa Basic V, ki se uporablja za programiranje robota, so že v naprej pripravljeni ukazi za delo s kamerami Cognex, prav tako pa tudi kamera skrbi za to, da so podatki, ki so poslani na robotski krmilnik pravilno interpretirani s strani robota. Kamera tudi podpira funkcijo pošiljanja zajetih slik na operaterski panel Mitsubishi GOT. Na ta način lahko sprotno na liniji pregledujemo zajete slike in delamo korekcije brez večjih zastojev proizvodnje linije.
Za zajem slike skrbi kamera Cognex 7402, katera vsebuje vso potrebno strojno opremo za obdelavo slike in pošiljanje podatkov v mrežo na ostale naprave. Kamera zajema sliko v velikosti 1280×1024, z do 102 slikama na sekundo. Vendar je hitrost zajemanja slik odvisna predvsem od časa zajemanja slike in ima podporo naprednim algoritmom PatMax, ki močno poenostavijo iskanje in analizo obdelovancev.
Inea RBT d.o.o.
Stegne 11, 1000 Ljubljana
Tel: 01 513 81 00

{kind=link}