Sedanji industrijski roboti so iz tehnološkega vidika glede na prve robote, ki je pomenil začetek robotske dobe ogromno napredovali. Sedaj predstavljajo nepogrešljiv del industrije, saj jih odlikuje visoka fleksibilnost, vzdržljivost, hitrost in preciznost.
 Vendar glede na vse njihove prej omenjene odlike, roboti še vedno pretežno delujejo na osnovi vnaprej določenih programiranih premikov. To pomeni, da se bo robot premaknil v neko določeno točko v prostoru in se bo znova in znova vračal v to pozicijo, s pogreškom le nekaj mikrometrov. Kar pa lahko predstavlja problematiko, če ne moremo zagotoviti geometrijske stabilnosti te točke. Denimo osnovni primer je vstavljanje nekega kosa v luknjo. Če se nam luknja izmakne od referenčne pozicije, pri kateri smo naučili robota, pomeni da bo vstavljanje kosa neuspešno. Taka situacija nam lahko pomeni trk robota v orodje, saj v osnovi pri robotih nimamo kontrole s kakšno silo naj deluje. Takih primerov je ogromno in v svetu robotike so se pojavile različne rešitve. Ena od rešitev je tako imenovan senzor sile, ki ga pritrdimo med prirobnico robota in robotskega prijemala. Na tak način lahko dobimo informacije o sili, ki delujejo na prijemalo oziroma o silah, ki jih povzroča robot in takih senzorjev je na tržišču sedaj že veliko. Nastavitev omenjenih senzorjev, glede na robota, je lahko še vedno dolgotrajen in kompleksen postopek. Na tržišču lahko hitro dobimo ugodnejši analogni senzor, vendar zanj po navadi potrebujemo še lastni PLK in lastni algoritem za preračunavanje signalov iz senzorja v sile. Nato je potrebno vzpostaviti komunikacijo med PLK-jem in robotskim krmilnikom. Šele po vsem tem lahko pričnemo pisati programe v robotu, kako naj se le-ta obnaša pri premikih glede na pridobljene informacije iz senzorja.
Vendar glede na vse njihove prej omenjene odlike, roboti še vedno pretežno delujejo na osnovi vnaprej določenih programiranih premikov. To pomeni, da se bo robot premaknil v neko določeno točko v prostoru in se bo znova in znova vračal v to pozicijo, s pogreškom le nekaj mikrometrov. Kar pa lahko predstavlja problematiko, če ne moremo zagotoviti geometrijske stabilnosti te točke. Denimo osnovni primer je vstavljanje nekega kosa v luknjo. Če se nam luknja izmakne od referenčne pozicije, pri kateri smo naučili robota, pomeni da bo vstavljanje kosa neuspešno. Taka situacija nam lahko pomeni trk robota v orodje, saj v osnovi pri robotih nimamo kontrole s kakšno silo naj deluje. Takih primerov je ogromno in v svetu robotike so se pojavile različne rešitve. Ena od rešitev je tako imenovan senzor sile, ki ga pritrdimo med prirobnico robota in robotskega prijemala. Na tak način lahko dobimo informacije o sili, ki delujejo na prijemalo oziroma o silah, ki jih povzroča robot in takih senzorjev je na tržišču sedaj že veliko. Nastavitev omenjenih senzorjev, glede na robota, je lahko še vedno dolgotrajen in kompleksen postopek. Na tržišču lahko hitro dobimo ugodnejši analogni senzor, vendar zanj po navadi potrebujemo še lastni PLK in lastni algoritem za preračunavanje signalov iz senzorja v sile. Nato je potrebno vzpostaviti komunikacijo med PLK-jem in robotskim krmilnikom. Šele po vsem tem lahko pričnemo pisati programe v robotu, kako naj se le-ta obnaša pri premikih glede na pridobljene informacije iz senzorja.
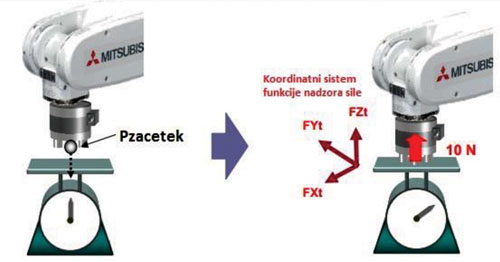
 Da bi se prehod na uporabo senzorja čim bolj poenostavil, nekateri proizvajalci za svoje robote ponujajo sistemsko podprte senzorje sile. En primer takega proizvajalca je Mitsubishi electric, ki za svoje robote ponuja tako imenovan »force sense function« izdelek. Prednost tega izdelka je popolna sistemska podprtost z Mitsubishi industrijskimi roboti serije RV in RH, kar pomeni enostavno montažo in vzpostavitev delovanja z robotom.
Da bi se prehod na uporabo senzorja čim bolj poenostavil, nekateri proizvajalci za svoje robote ponujajo sistemsko podprte senzorje sile. En primer takega proizvajalca je Mitsubishi electric, ki za svoje robote ponuja tako imenovan »force sense function« izdelek. Prednost tega izdelka je popolna sistemska podprtost z Mitsubishi industrijskimi roboti serije RV in RH, kar pomeni enostavno montažo in vzpostavitev delovanja z robotom.
Montaža in priklop senzorja na robota
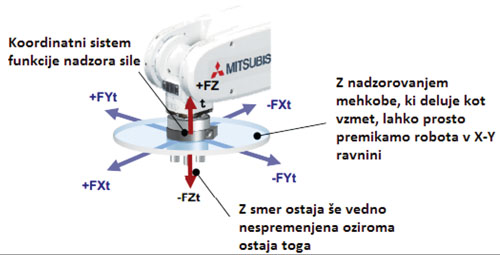
Izdelek vsebuje senzor sile in montažni set, ki se ga enostavno pritrdi na prirobnico robota. Senzor je preko serijskega kabla priklopljen na njegov krmilnik. Tukaj imamo možnost napeljave serijskega kabla ob robotski roki ali pa direktnega priklopa na notranjo inštalacijo robotske roke, ki jo vsi Mitsubishijevi roboti omogočajo. Tako se izognemo problematiki z opletanjem in poškodbami napeljave med samimi hitrimi premiki robota.
Krmilnik senzorja je zaradi čim hitrejše komunikacije povezan direktno na robotski krmilnik preko optične komunikacije (SSCNET III). Zaradi večje fleksibilnosti, omogoča krmilnik več različnih vrst priklopa (odvisno od zahtevane aplikacije).
Inea RBT d.o.o.
Stegne 11, 1000 Ljubljana
Tel: 01 513 81 00

{kind=link}