![]()
Sedanji industrijski roboti so iz tehnološkega vidika glede na prve robote, ki so pomenili začetek robotske dobe, ogromno napredovali. Sedaj predstavljajo nepogrešljiv del industrije, saj jih odlikuje visoka fleksibilnost, vzdržljivost, hitrost in preciznost.
 Vendar glede na vse njihove prej omenjene odlike, roboti še vedno pretežno delujejo na osnovi vnaprej določenih programiranih premikov. To pomeni, da se bo robot premaknil v neko določeno točko v prostoru in se bo znova in znova vračal v to pozicijo, s pogreškom le nekaj mikrometrov. Slednje lahko predstavlja problematiko, če ne moremo zagotoviti geometrijske stabilnosti te točke. Denimo osnovni primer je vstavljanje nekega kosa v luknjo. Če se nam luknja izmakne od referenčne pozicije, na katero smo robota naučili, pomeni da bo vstavljanje kosa neuspešno. Taka situacija lahko pripelje do trka robota v orodje, saj v osnovi pri robotih nimamo kontrole s kakšno silo naj deluje. Takih primerov je ogromno in v svetu robotike so se pojavile različne rešitve. Ena od rešitev je tako imenovani senzor sile, ki ga pritrdimo med prirobnico robota in robotskega prijemala. Na tak način lahko dobimo informacije o sili, ki delujejo na prijemalo oziroma o silah, ki jih povzroča robot. Takih senzorjev je na tržišču sedaj že veliko. Nastavitev omenjenih senzorjev glede na robota je lahko še vedno dolgotrajen in kompleksen postopek. Na tržišču lahko hitro dobimo ugodnejši analogni senzor, vendar zanj po navadi potrebujemo še lastni PLK in lastni algoritem za preračunavanje signalov iz senzorja v sile. Nato je potrebno vzpostaviti komunikacijo med PLK-jem in robotskim krmilnikom. Šele kasneje lahko pričnemo pisati programe v robotu, kako naj se le-ta obnaša pri premikih glede na pridobljene informacije iz senzorja.
Vendar glede na vse njihove prej omenjene odlike, roboti še vedno pretežno delujejo na osnovi vnaprej določenih programiranih premikov. To pomeni, da se bo robot premaknil v neko določeno točko v prostoru in se bo znova in znova vračal v to pozicijo, s pogreškom le nekaj mikrometrov. Slednje lahko predstavlja problematiko, če ne moremo zagotoviti geometrijske stabilnosti te točke. Denimo osnovni primer je vstavljanje nekega kosa v luknjo. Če se nam luknja izmakne od referenčne pozicije, na katero smo robota naučili, pomeni da bo vstavljanje kosa neuspešno. Taka situacija lahko pripelje do trka robota v orodje, saj v osnovi pri robotih nimamo kontrole s kakšno silo naj deluje. Takih primerov je ogromno in v svetu robotike so se pojavile različne rešitve. Ena od rešitev je tako imenovani senzor sile, ki ga pritrdimo med prirobnico robota in robotskega prijemala. Na tak način lahko dobimo informacije o sili, ki delujejo na prijemalo oziroma o silah, ki jih povzroča robot. Takih senzorjev je na tržišču sedaj že veliko. Nastavitev omenjenih senzorjev glede na robota je lahko še vedno dolgotrajen in kompleksen postopek. Na tržišču lahko hitro dobimo ugodnejši analogni senzor, vendar zanj po navadi potrebujemo še lastni PLK in lastni algoritem za preračunavanje signalov iz senzorja v sile. Nato je potrebno vzpostaviti komunikacijo med PLK-jem in robotskim krmilnikom. Šele kasneje lahko pričnemo pisati programe v robotu, kako naj se le-ta obnaša pri premikih glede na pridobljene informacije iz senzorja.
Da bi se prehod na uporabo senzorja čim bolj poenostavil, nekateri proizvajalci za svoje robote ponujajo sistemsko podprte senzorje sile. Primer takega proizvajalca je Mitsubishi Electric, ki za svoje robote ponuja tako imenovan »force sense function« izdelek. Prednost tega izdelka je popolna sistemska podprtost z Mitsubishi industrijskimi roboti serije RV in RH, kar pomeni enostavno montažo in vzpostavitev delovanja z robotom. V nadaljevanju je opisana uporaba senzorja sile na robotih Mitsubishi Electric.
Montaža in priklop senzorja na robot
 Izdelek vsebuje senzor sile in montažni set, ki se ga enostavno pritrdi na prirobnico robota. Senzor je preko serijskega kabla priklopljen na njegov krmilnik. Tu obstaja možnost napeljave serijskega kabla ob robotski roki ali pa direktnega priklopa na notranjo inštalacijo robotske roke, ki jo vsi Mitsubishijevi roboti omogočajo. Tako se izognemo problematiki z opletanjem in poškodbami napeljave med samimi hitrimi premiki robota.
Izdelek vsebuje senzor sile in montažni set, ki se ga enostavno pritrdi na prirobnico robota. Senzor je preko serijskega kabla priklopljen na njegov krmilnik. Tu obstaja možnost napeljave serijskega kabla ob robotski roki ali pa direktnega priklopa na notranjo inštalacijo robotske roke, ki jo vsi Mitsubishijevi roboti omogočajo. Tako se izognemo problematiki z opletanjem in poškodbami napeljave med samimi hitrimi premiki robota.
Krmilnik senzorja je zaradi čim hitrejše komunikacije povezan direktno na robotski krmilnik preko optične komunikacije (SSCNET III). Zaradi večje fleksibilnosti krmilnik omogoča več različnih vrst priklopa (odvisno od zahtevane aplikacije).
Nastavitve senzorja sile
 Po priklopu senzorja sile je potrebno robota nastaviti, da pravilno zazna senzor in pravilno interpretira pridobljene podatke. Za to imamo vnaprej pripravljenih veliko naborov parametrov v robotu, ki nam olajša in »pospeši« potrebne nastavitve. Primeri takih parametrov nam omogočajo identifikacijo in kalibracijo senzorja, ko izbiramo med levo sučnim ali desno sučnim koordinatnim sistemom. S temi sistemskimi funkcijami lahko tudi omogočimo večjo varnost robota pri uporabi senzorja. Tako imamo že v nastavitvah in mimo našega programa določeno maksimalno toleranco uporabljene sile in maksimalni dovoljeni odmik robota, ko je ta v načinu, da njegovo trajektorijo pomikanja določa senzor in ne več vnaprej shranjene pozicije.
Po priklopu senzorja sile je potrebno robota nastaviti, da pravilno zazna senzor in pravilno interpretira pridobljene podatke. Za to imamo vnaprej pripravljenih veliko naborov parametrov v robotu, ki nam olajša in »pospeši« potrebne nastavitve. Primeri takih parametrov nam omogočajo identifikacijo in kalibracijo senzorja, ko izbiramo med levo sučnim ali desno sučnim koordinatnim sistemom. S temi sistemskimi funkcijami lahko tudi omogočimo večjo varnost robota pri uporabi senzorja. Tako imamo že v nastavitvah in mimo našega programa določeno maksimalno toleranco uporabljene sile in maksimalni dovoljeni odmik robota, ko je ta v načinu, da njegovo trajektorijo pomikanja določa senzor in ne več vnaprej shranjene pozicije.
Funkcionalnosti senzorja sile
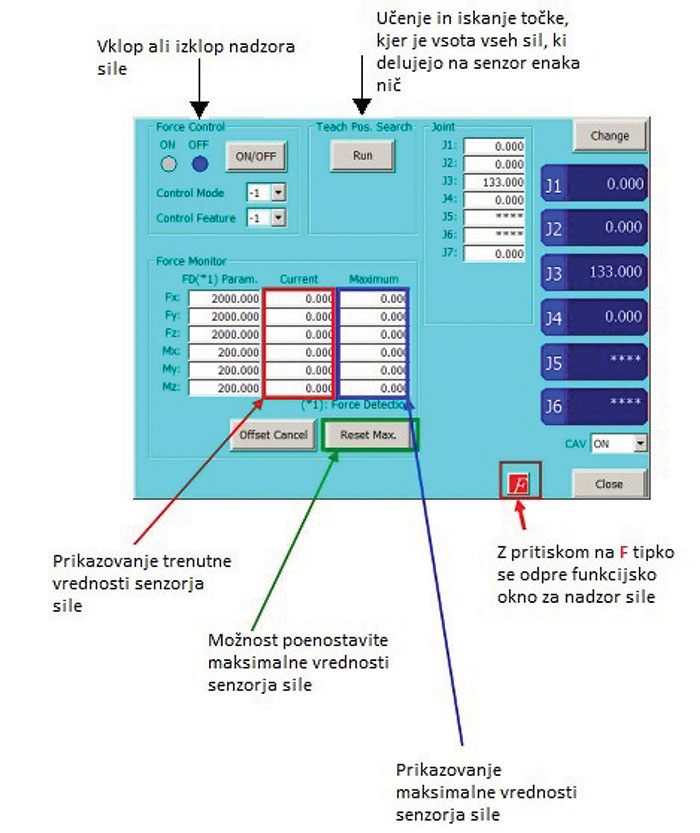
 Kot smo že omenili, gre tukaj za senzor, ki je sistemsko popolnoma podprt s strani robota, tako da nam po že zgoraj omenjenih nastavitvah robot v svojem operacijskem sistemu avtomatsko sam ponudi dodatne funkcije, ki nam niso bile vidne pred vklopom senzorja in se uporabljajo samo v ta namen. Primer tega je viden v ročnem pomiku robota z učno enoto (JOG mode), kjer imamo na voljo novo okno, ki nam prikazuje trenutne sile, ki delujejo na senzor in več možnosti za upravljanje z njim.
Kot smo že omenili, gre tukaj za senzor, ki je sistemsko popolnoma podprt s strani robota, tako da nam po že zgoraj omenjenih nastavitvah robot v svojem operacijskem sistemu avtomatsko sam ponudi dodatne funkcije, ki nam niso bile vidne pred vklopom senzorja in se uporabljajo samo v ta namen. Primer tega je viden v ročnem pomiku robota z učno enoto (JOG mode), kjer imamo na voljo novo okno, ki nam prikazuje trenutne sile, ki delujejo na senzor in več možnosti za upravljanje z njim.
Poleg dodatnih funkcij v ročnem načinu je največja prednost takšnega senzorja programska podprtost pri izdelovanju programov robota. Pri prej omenjenih univerzalnih senzorjih dobimo podatke le o tem, kako velika je sila in iz katere smeri je prisotna glede na kartezični koordinatni sistem. Kako naj se robot obnaša glede na te podatke, pa moramo po navadi sami spisati algoritme. V primeru opisanega senzorja imamo na voljo več načinov oziroma programskih funkcij, kako naj se obnaša robot glede na dobljene podatke.
Integrirane programske funkcije za upravljanje s senzorjem sile
 Funkcija nadzora sile (Force sense control)
Funkcija nadzora sile (Force sense control)
Funkcija se uporablja za nadzor mehkobe in pritisne sile robota. Odvisno od aplikacije, pa se funkcija lahko preklaplja med nadzorom sile (force control) in nadzorom togosti (stiffness control). Značilnosti vsake vrste nadzora so opisane spodaj:
Nadzor sile (force control)
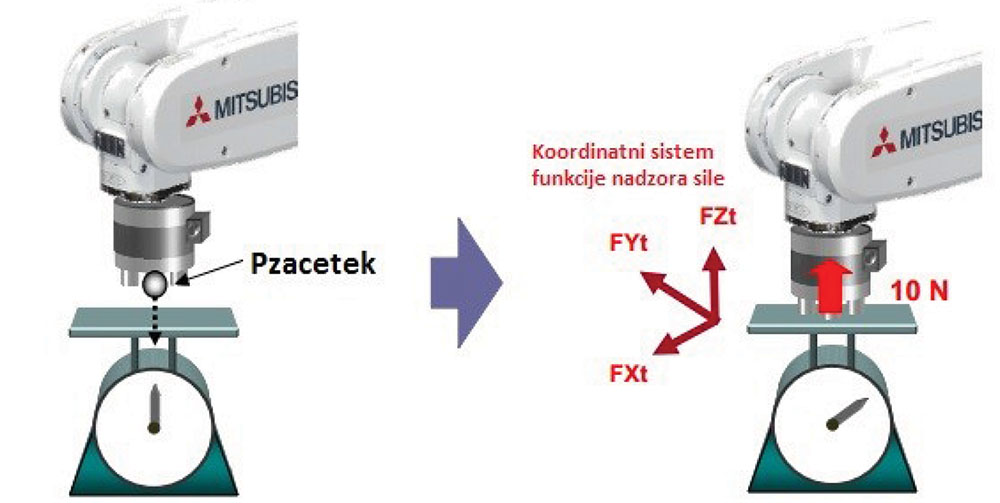
Ta način nadzora krmili robota, da vedno potiska le z določeno silo. To pomeni, da se robot samodejno premakne v položaj v katerem je mogoče dobiti določeno reakcijo sile. Robot se lahko premika tudi med potiskanjem obdelovanca s konstantno silo in istočasno ohranja stik.
Primer na sliki 3 prikazuje osnovno uporabo nadzora sile. Robot je pripeljan v začetno točko Pzacetek, kjer se vključi funkcija. Po vklopu se robot samodejno prične pomikati v koordinatnem sistemu funkcije nadzora v smeri +FZt, vse dokler ni mogoče pridobiti sile 10N.
Prostovoljno pa lahko tudi med samo uporabo funkcije spreminjamo nastavitve, kot so na primer želena sila pritiska. Denimo, da med pomikom robota iz točke P1 v točko P2 želimo spremeniti silo iz 5N v 12N. Določimo lahko tudi pri kateri razdalji naj se postopoma prične spreminjati sila.
Nadzor togosti (stiffness control)
Ta način delovanja se uporablja za kontroliranje robota, da robot deluje mehko kot vzmet. Z uporabo zunanje sile se robot premika samodejno v smeri, ki omogoča pobeg pred zunanjo silo. Ta vrsta nadzora se lahko uporablja za zatiranje sil, ki delujejo na obdelovanec med tem, ko robot obdelovanec vstavlja.
Robotsko roko lahko nastavimo, da se obnaša kot vzmet v katerikoli smeri. Na primeru na sliki 5 imamo predpostavljeno, da je funkcija nadzora vključena samo v X-Y smeri kar pomeni, da se robot samodejno pomika samo v teh dveh smereh, ko nanj delujejo sile.
Funkcija zaznavanja sile (Force sense detection)
V primeru, da nam zgornje funkcije ne odgovarjajo za naš tip aplikacije, lahko še vedno svobodno uporabljamo svoje lastne procedure kako naj se obnaša robot v primeru fizičnega kontakta. To dosežemo z uporabo funkcije zaznavanja sile (Force sense detection). To funkcijo lahko uporabljamo tudi v kombinaciji s prekinitvenimi rutinami.
Funkcija dnevnika sile (Force sense log)
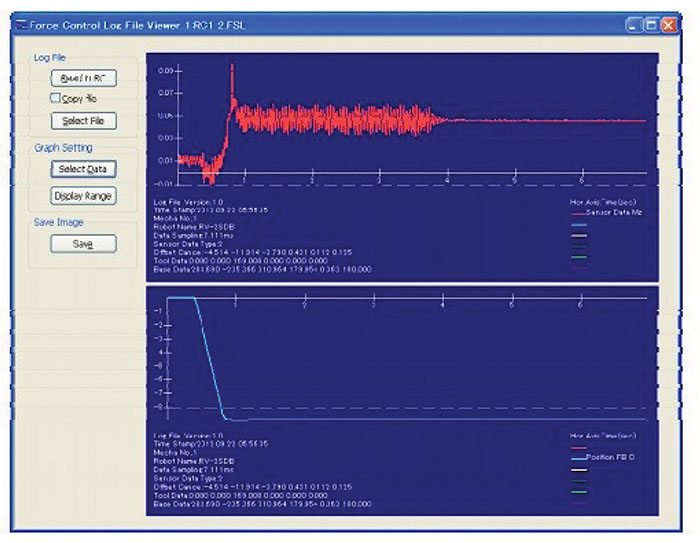
V industriji je tudi vse bolj prisoten nadzor kvalitete izdelave oziroma kontrola »Kaj se dogaja v proizvodnji«. Tako ima Mitsubishijeva rešitev tudi funkcijo za pridobivanje in izpisovanje podatkov senzorja sile in podatkov o pozicijah robota. Pridobljene podatke se lahko pregleduje v obliki grafa z uporabo programskega orodja robota RTToolBox2. Ima tudi možnost prenašanja podatkov preko FTP strežnika na računalnik. To nam omogoča sprotno preverjanje robotske kvalitete in analizo podatkov v primeru napake.
Zaključek
V opisanem primeru uporabe senzorja sile lahko vidimo kakšne funkcije prinaša uporaba le tega, ter široko uporabnost v množici industrijskih aplikacij, kjer ne moremo zagotoviti popolne geometrijske točnosti in stabilnosti točke. Mitsubishijeva rešitev je z vidika namestitve enostavna, senzor se povezuje preko SSCNET III optične komunikacije in tudi omogoča več drugih vrst priklopa. Ker gre za popolno sistemsko integracijo imamo dobro programsko podprtost s strani robota, npr. podprte programske funkcije in nastavitve senzorja, ki jih opravljamo kar v sistemskih nastavitvah robota. Prednost tega je tudi integracija diagnostike senzorja v diagnostiko robota. To pomeni, da imamo v primeru napake na senzorju ali padca komunikacije vse potrebne informacije na robotu. Če se pa take situacije zgodijo med gibanjem robota pa le ta tudi samodejno deluje, kot da bi šlo za njegovo lastno napako.
Inea RBT d.o.o.Stegne 11
1000 Ljubljana
Tel: 01 513 81 00
E-pošta: info@inea-rbt.si
www.inea-rbt.si

{kind=link}