![]()
Raziskovalci univerze Berkeley v Kaliforniji so razvili tehnologijo robotskega učenja, ki robotom omogoča, da vidijo svoja bodoča dejanja in tako ugotovijo, kako upravljati s predmeti, s katerimi se še nikoli niso srečali.
 V prihodnosti bi ta tehnologija lahko omogočala samo-vozečim avtomobilom predvidevanje bodočih dogodkov v prometu in občutno prispevala k bolj inteligentnemu delovanju robotskih hišnih pomočnikov. Začetni prototip je trenutno usmerjen v samostojno učenje osnovnih prijemalnih gibov.
V prihodnosti bi ta tehnologija lahko omogočala samo-vozečim avtomobilom predvidevanje bodočih dogodkov v prometu in občutno prispevala k bolj inteligentnemu delovanju robotskih hišnih pomočnikov. Začetni prototip je trenutno usmerjen v samostojno učenje osnovnih prijemalnih gibov.
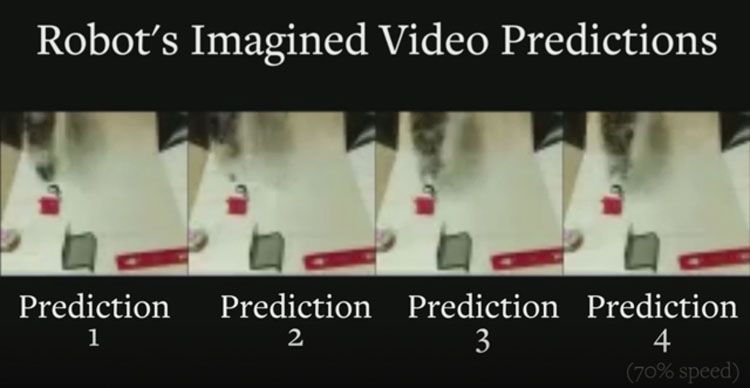
Z uporabo te tehnologije imenovane “vidno predvidevanje”, lahko roboti predvidijo, kakšno spremembo bo na kameri povzročil določen premik ali zaporedje gibov. Za zdaj je ta robotska “domišljija” relativno osnovna, saj predvideva le nekaj sekund vnaprej, a to je dovolj, da robot premika predmete po mizi, ne da bi se pri tem dotaknil drugih predmetov ali ovir na mizi. Najpomembnejše pri tem pa je, da se takega gibanja nauči robot sam, brez posredovanja programerjev in celo brez poznavanja okolja, objektov in zakonov fizike. To je mogoče zaradi vizualnega učenja, ki ga stroj izvaja popolnoma sam, med nenadzorovanim samo-raziskovanjem, ko se robot pravzaprav igra s predmeti na mizi. Po igralni fazi si robot sestavi nekakšen model sveta, s pomočjo katerega predvideva obnašanje predmetov s katerimi se še ni nikoli srečal.
“Enako, kot si mi predstavljamo, kako bodo naši premiki vplivali na predmete okrog nas, si s to metodo tudi roboti predstavljajo, kako bodo njihove različne poteze vplivale na svet okrog njih” pravi Sergey Levine, profesor oddelka za Električni inženiring in računalniške znanosti na univerzi Berkeley. “To lahko omogoči inteligentno načrtovanje visoko fleksibilnih sposobnosti v življenjskih situacijah.”
 Jedro tega sistema je tehnologija globokega učenja, osnovana na predvidevanju in na podlagi večkrat videnega (dynamic neural advection-DNA). Modeli osnovani na DNA predvidijo, kako se bodo posamezne točke na sliki kamere spreminjale glede na robotova dejanja. Pred kratkim še izboljšani DNA modeli, kot tudi izboljšane zmožnosti načrtovanja, omogočajo vodenje, oziroma krmiljenje robota na osnovi videnega, da lahko izvaja tudi zahtevnejše naloge, kot so na primer premikanje predmetov mimo ovir in premik večjih predmetov.
Jedro tega sistema je tehnologija globokega učenja, osnovana na predvidevanju in na podlagi večkrat videnega (dynamic neural advection-DNA). Modeli osnovani na DNA predvidijo, kako se bodo posamezne točke na sliki kamere spreminjale glede na robotova dejanja. Pred kratkim še izboljšani DNA modeli, kot tudi izboljšane zmožnosti načrtovanja, omogočajo vodenje, oziroma krmiljenje robota na osnovi videnega, da lahko izvaja tudi zahtevnejše naloge, kot so na primer premikanje predmetov mimo ovir in premik večjih predmetov.
“V preteklosti smo robote učili ljudje, sedaj pa se s pomočjo vidnega predvidevanja roboti lahko sami naučijo velik nabor različnih premikov predmetov, kar je nadvse navdušujoče” pravi Chelsea Finn, doktorski študent v Levinovem laboratoriju in oče prvotnega modela DNA.
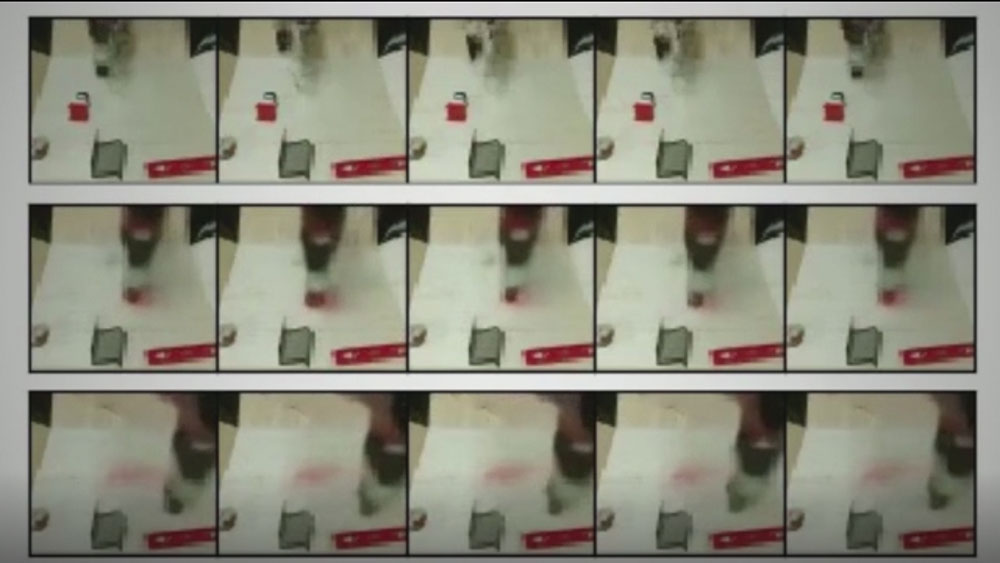
S pomočjo nove tehnologije robot premakne predmet na mizi in potem ta priučeni model uporabi pri izbiri zaporedja gibov, ki bodo predmet prestavili na želeno mesto. Robot sestavi model iz neobdelanih podatkov kamere, ki je premik opazovala. Tako se naučijo premike, ki so potrebni za izogibanje oviram.
“Ljudje se tekom svojega življenja naučimo sposobnosti premikanja predmetov brez kakršne koli pomoči ali učitelja preko tisočerih interakcij z različnimi predmeti. Pokazali smo, da je mogoče zgraditi robota, ki prav tako izkorišča veliko količino zbranih izkušenj in jih kasneje uporabi za najrazličnejše premike predmetov.” pravi Frederik Ebert, študent v Levinovem laboratoriju, ki je sodeloval pri projektu.
 Ker je nadzor preko vidnega predvidevanja odvisen le od informacij, ki jih robot zbira sam preko kamere, je ta tehnologija zelo splošno uporabna na različnih področjih. V nasprotju z dosedanjimi metodami, pri katerih morajo ljudje ročno označiti tisoče ali celo milijone slik za dostojno predvidevanje, potrebujemo za model vidnega predvidevanja le video, ki ga robot pridobi sam. Zelo obetavni so bili tudi rezultati, ko so takšne modele uporabili na zbirkah podatkov, ki so vsebovale podatke o človeških aktivnostih, celo v zvezi z vožnjo vozil.
Ker je nadzor preko vidnega predvidevanja odvisen le od informacij, ki jih robot zbira sam preko kamere, je ta tehnologija zelo splošno uporabna na različnih področjih. V nasprotju z dosedanjimi metodami, pri katerih morajo ljudje ročno označiti tisoče ali celo milijone slik za dostojno predvidevanje, potrebujemo za model vidnega predvidevanja le video, ki ga robot pridobi sam. Zelo obetavni so bili tudi rezultati, ko so takšne modele uporabili na zbirkah podatkov, ki so vsebovale podatke o človeških aktivnostih, celo v zvezi z vožnjo vozil.
“Otroci se učijo o svetu, ki jih obkroža, s premikanjem igrač, prijemanjem in igranjem. Cilj naše raziskave je omogočiti robotom, da se učijo na enak način.” pravi Levine. “Zmožnosti tega robota so še vedno omejene, a so samostojno naučene in mu omogočajo predvidevanje zapletenih fizikalnih interakcij, predhodno neznanih predmetov, s pomočjo predhodno opaženih vzorcev gibanj.”
Znanstveniki univerze Berkeley nadaljujejo raziskave na področju vidnega predvidevanja in izboljšujejo predvidevanje in nadzor, kot tudi bolj napredne načine zbiranja še bolj natančnih podatkov iz videa, za natančne naloge, kot so premikanje in pobiranje majhnih predmetov in upravljanje z mehkimi ali stisljivimi predmeti, kot so vrvi ali tekstil, pa tudi za sestavljanje kompleksnejših premetov.
Povzeto po:
https://www.sciencedaily.com/releases/2017/12/171204162335.htm

{kind=link}