![]()
Krmilniki serije SIMATIC S7-1500T technology poleg standardnih in varnostnih funkcij omogočajo dodatne knjižnice za poenostavljeno manipulacijo elementov gibanja.
 Glavne prednosti tehnoloških krmilnikov so razširjene naloge nadzora gibanja, kot so sinhronizacija in vektorsko pozicioniranje več osi med sabo ter nadzor navora. Omogočena nam je tudi visoka stopnja inženirske učinkovitosti zaradi grafične in tabelarne konfiguracije v TIA portalu. V kombinaciji s programskim paketom TIA Portal V15 in krmilniki serije SIMATIC S7-1500T, je od firmware verzije V.2.5 sedaj omogočen nadzor 2D- in 3D-kinematike z do štirimi interpolacijskimi osmi in zanesljivo spremljanje kinematičnega gibanja v predhodno definiranem prostoru s procesorjem CPU 1517TF-3PN / DP.
Glavne prednosti tehnoloških krmilnikov so razširjene naloge nadzora gibanja, kot so sinhronizacija in vektorsko pozicioniranje več osi med sabo ter nadzor navora. Omogočena nam je tudi visoka stopnja inženirske učinkovitosti zaradi grafične in tabelarne konfiguracije v TIA portalu. V kombinaciji s programskim paketom TIA Portal V15 in krmilniki serije SIMATIC S7-1500T, je od firmware verzije V.2.5 sedaj omogočen nadzor 2D- in 3D-kinematike z do štirimi interpolacijskimi osmi in zanesljivo spremljanje kinematičnega gibanja v predhodno definiranem prostoru s procesorjem CPU 1517TF-3PN / DP.
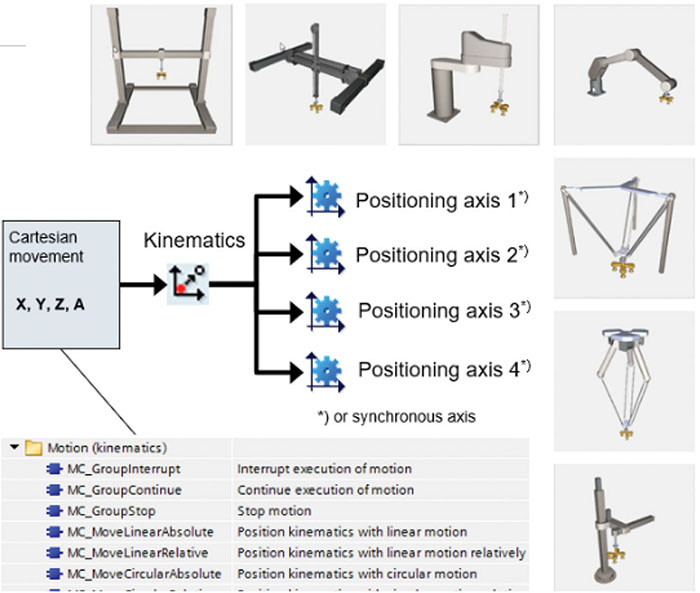
Kinematski stroji so strojni sistemi, ki jih je mogoče programirati in v katerih je več mehansko vezanih osi, ki tvorijo kinematično enoto in povzročajo gibanje delovne točke. Tehnološki krmilniki S7-1500T zagotavljajo funkcije za nadzor kinematičnih sistemov in opravljanje nalog. Tipične aplikacije vključujejo: pick & place elementov, polaganje, zlaganje in sestavljanje elementov. Znotraj programskega paketa TIA Portal V15 je sedaj na voljo uporaba tehnoloških objektov (TO) za kinematiko. Predhodno so definirani tehnološki objekti za 2D−4D-kinematiko, ki omogočajo preprosto upravljanje standardnih kinematskih naprav, kot so tipi manipulatorjev: SCARA 3D, Portal 3D, Articulated Arm, Roll Picker, 2/3D Delta Pickerji 2/3D, 3D tripodi. Posamezni objekti so za uporabnika preoblikovani kot funkcijski blok (FB) za nadaljnjo integracijo v uporabniško definirane projekte.
 Omogočene so nam do štiri interpolacijske osi (X, Y, Z in A − orientacija ali vrtenje prijemala) in preračunavanje gibanja poti z vnaprej določenimi točkami, snemanjem poti ali z uvozom poti iz drugih formatov (CAD).
Omogočene so nam do štiri interpolacijske osi (X, Y, Z in A − orientacija ali vrtenje prijemala) in preračunavanje gibanja poti z vnaprej določenimi točkami, snemanjem poti ali z uvozom poti iz drugih formatov (CAD).
Pozicioniranje osi
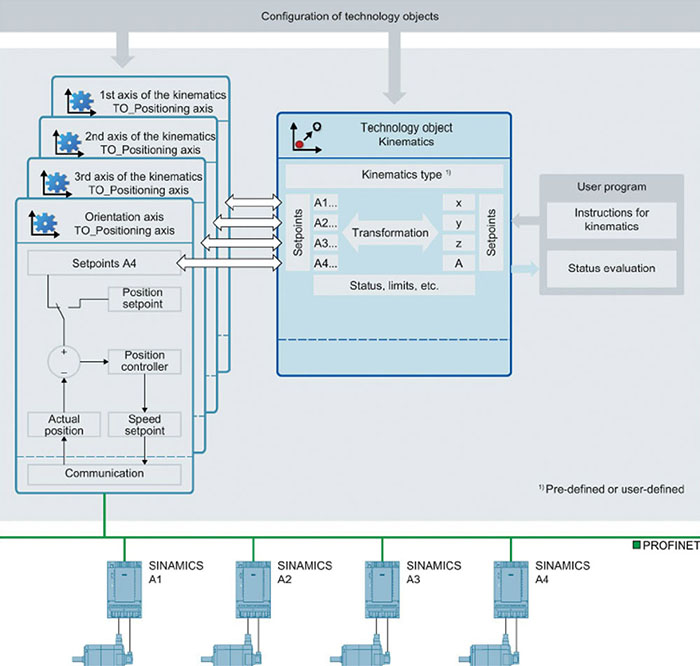
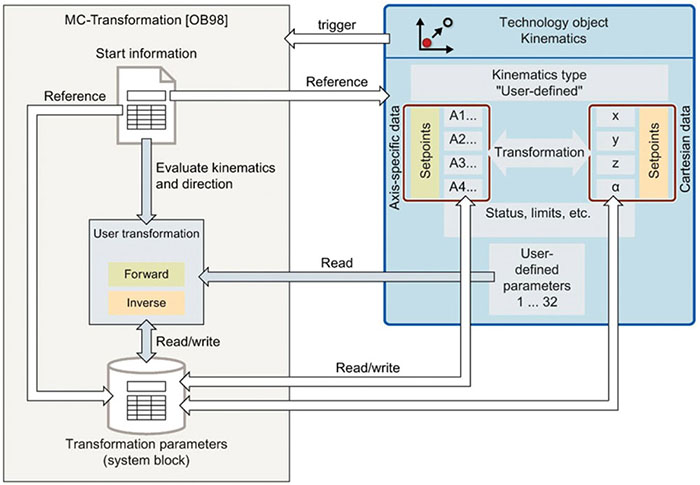
Tehnološki objekt (TO) za kinematiko izračuna nastavljene vrednosti gibanja za center orodja TCP (Total Center Point) ob upoštevanju dinamičnih nastavitev. Kinematični TO izračuna nastavljene vrednosti gibanja za posamezne osi kinematike in obratne trenutne vrednosti osi s pomočjo kinematske transformacije. Kinematika tehnološkega objekta sproži nastavljene vrednosti osi za medsebojno povezane pozicijske osi. TO omogoča pretvorbo poti za v naprej določene vrste kinematike na ravni sistema. S tem močno poenostavi programiranje manipulatorja. Princip delovanja TO kinematike vidite na sliki 3.
 Pred-definirano pozicioniranje s strani uporabnika
Pred-definirano pozicioniranje s strani uporabnika
Programski paket omogoča vnaprejšnje programiranje poti gibanja, ki pa ga lahko nato uporabnik upravlja v ročnem režimu z ukazi. Pri tem pa se kinematika samodejno preračunava v ozadju.
Koordinatni sistemi
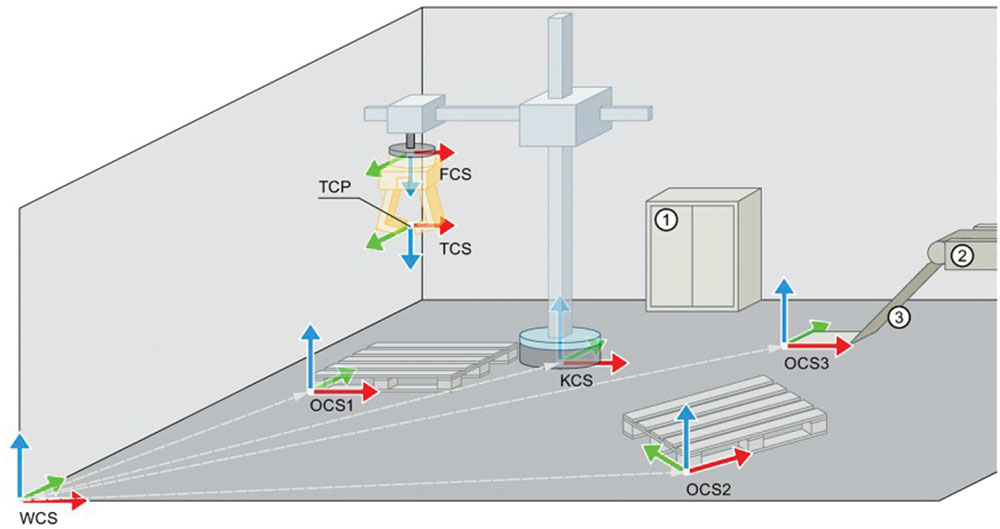 Program omogoča preračunavanje med različni koordinatnimi sistemi za opis položaja manipulatorjev in predmetov v delovnem območju po standardu DIN 66217:
Program omogoča preračunavanje med različni koordinatnimi sistemi za opis položaja manipulatorjev in predmetov v delovnem območju po standardu DIN 66217:
- World coordinate system (WCS),
- Kinematics coordinate system (KCS),
- Flange coordinate system (FCS),
- Tool coordinate system (TCS),
- Object coordinate systems (OCS)
Nadzor območja delovanja stroja Namen nadzora nad območjem delovanja stroja je preprečitev trčenj z ostalimi statičnimi objekti (stena, omara…) v območju delovanja stroja. Vnaprej lahko določimo območja oziroma kje je dovoljeno gibanje stroja. S tem lahko preprečimo morebitne nezgode ali povzročitve materialne škode na ostalih napravah. Pri tem nam je na voljo več nivojev alarmiranja in ukrepov. Posamezne cone lahko po potrebi vklapljamo ali izklapljamo.
Namen nadzora nad območjem delovanja stroja je preprečitev trčenj z ostalimi statičnimi objekti (stena, omara…) v območju delovanja stroja. Vnaprej lahko določimo območja oziroma kje je dovoljeno gibanje stroja. S tem lahko preprečimo morebitne nezgode ali povzročitve materialne škode na ostalih napravah. Pri tem nam je na voljo več nivojev alarmiranja in ukrepov. Posamezne cone lahko po potrebi vklapljamo ali izklapljamo.
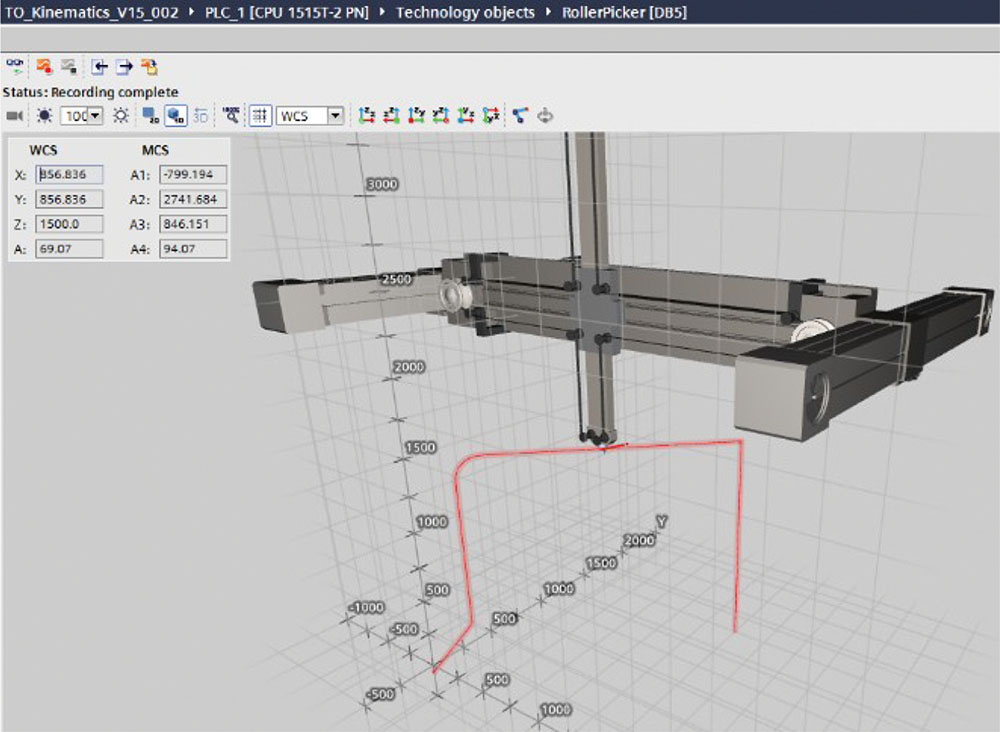
Kinematic Trace
Nam omogoča, da ustvarimo in preizkusimo pot, po kateri naj se roka manipulatorja giblje s pomočjo 3D-vizualizacije. Pri tem pa to pot posnamemo in shranimo za kasnejšo uporabo v programu. Dinamično načrtovanje poteka preko celotne verige.
Sama simulacija znotraj programskega paketa nam omogoča uporabo virtualnih osi motorja, s katero lahko vnaprej preizkusimo delovanje naprave v 3D-okolju.
Vnos poti iz zunanjih datotek v CAD formatu
V TIA portalu je mogoče uporabiti orodje GCode2Move Path tool, s katerim nam je omogočeno, da pot ustvarimo iz vektorske grafike, ki jo uvozimo iz datoteke v CAD formatu.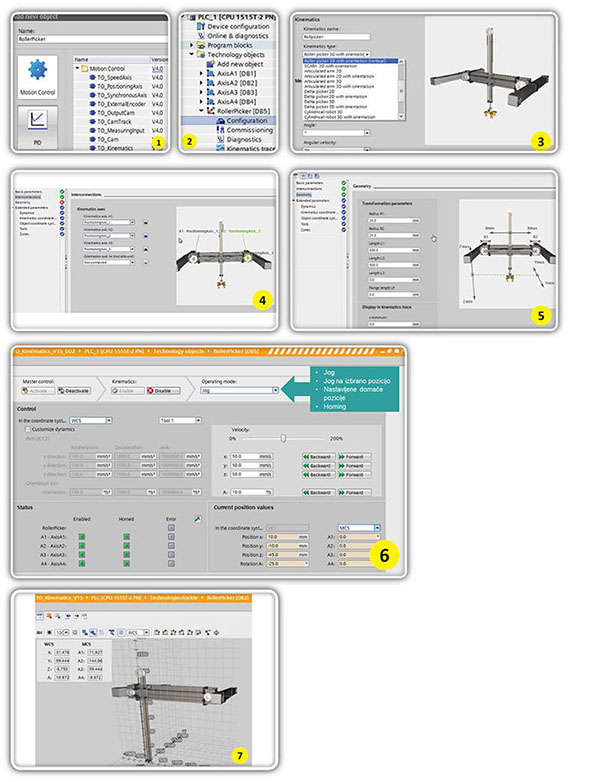
Primernost uporabe krmilnikov SIMATIC S7-1500T se kaže predvsem na napravah, kjer se uporabljajo krmilniki S7-1500 in želimo razširiti njihovo funkcionalnost na področje kinematike. Z uporabo teh pa zadostimo tudi potrebi po hitrostni in položajni regulaciji. Primer tega so razne sestavljalne ali pakirne linije, kjer želimo uporabiti funkcijo pick & place ali za izvedbo večjega nestandardnega SCARA sistema, ki presega okvirje standardnih manipulatorjev na trgu. Velika uporabnost S7-1500T se kaže pri gibanju velikih dvigal, kjer imamo za pozicioniranje uporabljene motorje velikih moči. Z uporabo tehnoloških krmilnikov pa hkrati zadostimo pogojem za varno delo z uporabo con, kjer stroj lahko deluje, in fleksibilnosti, saj cone lahko po potrebi izklapljamo.
Postopek konfiguracije sistema
- Izberemo tehnološki objekt TO .
- Izberemo ustrezno konfiguracijo manipulatorja (na primer roller picker) in izberemo število pozicijskih osi. Na katerih preko čarovnika konfiguriramo frekvenčni pretvornik, motor in dajalnik pozicije osi motorja.
- Konfiguriranje manipulatorja naprave. V našem primeru roller picker.
- Povezovanje osi manipulatorja z izbranim manipulatorjem(omogočena je izbira virtualne osi v namen simulacije).
- Nastavljanje parametrov geometrije.
- Spuščanje v zagon prek uporabniškega vmesnika v povezavi s simulacijskim okoljem, kjer uporabimo virtualne osi in 3D simulacijo, ali v realnem okolju.
- Simuliranje in spremljanje manipulatorja v 3D okolju kinematic trace. Ustvarjanje poti gibanja roke manipulatorja.
Letališka cesta 29c
1000 Ljubljana
E-pošta: andrej.lazovic@siemens.com
www.siemens.com

{kind=link}