![]()
Pogosto imamo željo in potrebo po testiranju programa nekega avtomatiziranega sistema že pred prvim zagonom, da bi se izognili nepotrebnim napakam, težavam in posledično tudi stroškom. To je mogoče s pomočjo simulacijskih orodij, s katerimi se naredi digitalni dvojnik realnega sistema.
 Na splošno velja, da kasneje, kot se odkrije napaka, dražje jo je odpraviti. Z digitalnim dvojnikom stroja lahko inženirji v zgodnji fazi simulirajo in validirajo vse funkcije in interakcije med mehanskimi komponentami, električno opremo in avtomatizacijo. Tako imajo upravljavci obratov in strojev možnost, da svoje osebje predčasno usposobijo za delo z napravami, novozaposlene pa usposobijo s predhodnim usposabljanjem v virtualnem okolju, brez ogrožanja tekoče proizvodnje.
Na splošno velja, da kasneje, kot se odkrije napaka, dražje jo je odpraviti. Z digitalnim dvojnikom stroja lahko inženirji v zgodnji fazi simulirajo in validirajo vse funkcije in interakcije med mehanskimi komponentami, električno opremo in avtomatizacijo. Tako imajo upravljavci obratov in strojev možnost, da svoje osebje predčasno usposobijo za delo z napravami, novozaposlene pa usposobijo s predhodnim usposabljanjem v virtualnem okolju, brez ogrožanja tekoče proizvodnje.
Hitrejši zagon in zmanjšanje stroškov
Digitalni dvojnik novega stroja omogoča paralelno načrtovanje mehanskega stroja, elektroprojekta in izdelave programa, tako da ni več treba čakati na zaključene faze projekta. Gre za virtualen zagon v digitalnem razvojnem okolju v pisarni, pred zagonom prave naprave. Zahvaljujoč simulaciji stroja se lahko izvedejo obsežni testi za odkrivanje in popravljanje napak pri načrtovanju in funkcionalnosti. Posledica tega je, da se zagon dejansko zaključi v veliko krajšem času.
Metodologija Six Sigma opisuje pomen odkrivanja morebitnih napak v zgodnji fazi razvoja. Pomaga izračunati kvote napak, ki se pojavijo med poslovnim procesom. Ključna ugotovitev modela je, da se neprepoznane napake razširjajo po vrednostni verigi. Pozneje kot je odkrita napaka, dražje jo je odpraviti in stroški se povečajo za faktor deset na razvojni korak (rule of ten). Zato ima virtualno simuliranje toliko potenciala za proizvajalce strojev.
Orodja za simulacijo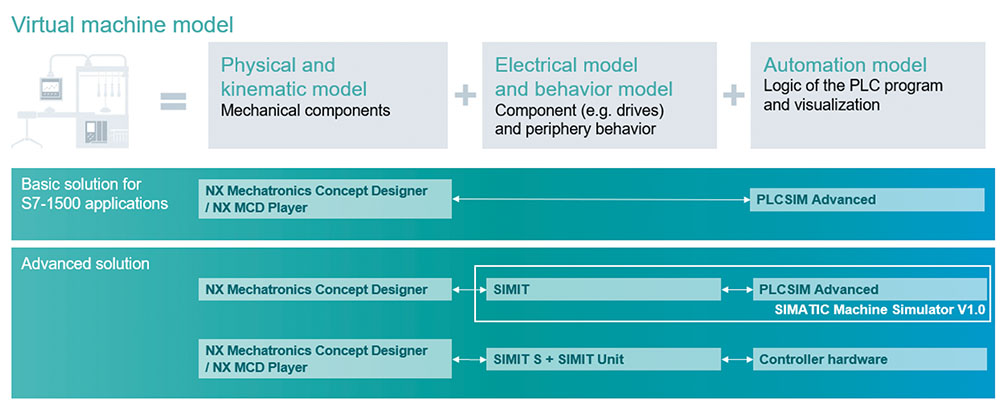 TIA Portal V15 in SIMATIC PLCSIM Advanced 2.0 nam omogočata ustvarjanje digitalnega dvojnika s krmilniki SIMATIC S7-1500. NX Mechatronics Concept Designer (NX MCD) je programsko fizikalno okolje, kjer je mogoče simulirati mehanske koncepte. Ti programi skupaj predstavljajo osnovo za virtualno validacijo celotnih strojev. Tako je mogoče sinhronizirati mehanski sklop in aplikativni program v realnem času, vključno s preprostimi ali bolj zapletenimi modeli vodenja, na virtualnem CAD modelu stroja. Mehanskemu modelu stroja, ki je ustvarjen na podlagi 3D podatkov iz modelirnega programa, so v NX MCD dodane fizikalne in kinematične lastnosti stroja. 3D model navideznega stroja v NX MCD se nato poveže z virtualnim krmilnikom, ki ga ustvarimo na PLCSIM Advanced. Možna je tudi naprednejša simulacija, ki jo lahko nadgradimo preko vmesnega programskega okolja SIMIT, kjer lahko uporabimo telegrame in dodamo želene karakteristike fizikalnih modelov pogonov, membran, reaktorskih posod ali ustvarimo svoje (importiramo lahko karakteristike, uporabimo linearne diferencialne enačbe itd.). PLCSIM Advanced in SIMIT skupaj tvorita SIMATIC Machine Simulator.
TIA Portal V15 in SIMATIC PLCSIM Advanced 2.0 nam omogočata ustvarjanje digitalnega dvojnika s krmilniki SIMATIC S7-1500. NX Mechatronics Concept Designer (NX MCD) je programsko fizikalno okolje, kjer je mogoče simulirati mehanske koncepte. Ti programi skupaj predstavljajo osnovo za virtualno validacijo celotnih strojev. Tako je mogoče sinhronizirati mehanski sklop in aplikativni program v realnem času, vključno s preprostimi ali bolj zapletenimi modeli vodenja, na virtualnem CAD modelu stroja. Mehanskemu modelu stroja, ki je ustvarjen na podlagi 3D podatkov iz modelirnega programa, so v NX MCD dodane fizikalne in kinematične lastnosti stroja. 3D model navideznega stroja v NX MCD se nato poveže z virtualnim krmilnikom, ki ga ustvarimo na PLCSIM Advanced. Možna je tudi naprednejša simulacija, ki jo lahko nadgradimo preko vmesnega programskega okolja SIMIT, kjer lahko uporabimo telegrame in dodamo želene karakteristike fizikalnih modelov pogonov, membran, reaktorskih posod ali ustvarimo svoje (importiramo lahko karakteristike, uporabimo linearne diferencialne enačbe itd.). PLCSIM Advanced in SIMIT skupaj tvorita SIMATIC Machine Simulator.
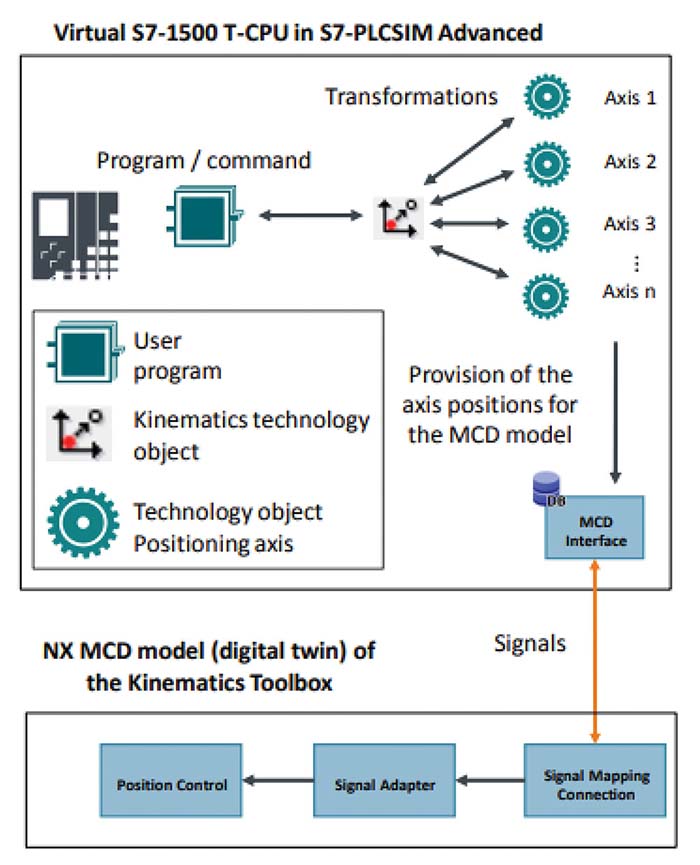
SIMATIC PLCSIM Advanced nam omogoča priklop tudi ostalih simulacijskih okolij in zunanjih krmilnikov, ki podpirajo TCP/IP, na PLCSIM Advanced. Primer take povezave je simulator 6-osnega robota KUKA.Sim in podobnih. S tem lahko sočasno simuliramo 4-osne manipulatorje (npr. kartezične portale, SCARA robote), katerih kinematika se preračunava na tehnoloških krmilnikih S7-1500T in simulacija krmilnika 6-osnega robota, od katerega dobimo matematično pravilen položaj gibanja robota. Vse skupaj nato združimo na enem modelu v NX MCD.
 V programskem okolju TIA Portal je mogoča izdelava celotnega programa 6-osnega robota. To je mogoče, ker so izdelane knjižnice za povezavo krmilnikov 6-osnih robotov, ki nam omogočajo, da krmilnik S7-1500 upravlja z robotom, s čimer lahko celotno aplikacijo izdelamo v TIA Portalu (dostopne so knjižnice proizvajalcev robotov KUKA, Yaskawa, Denso in Stäubli). Možne so tudi povezave s simulatorjem za optični vid, tehtalnimi moduli itd.
V programskem okolju TIA Portal je mogoča izdelava celotnega programa 6-osnega robota. To je mogoče, ker so izdelane knjižnice za povezavo krmilnikov 6-osnih robotov, ki nam omogočajo, da krmilnik S7-1500 upravlja z robotom, s čimer lahko celotno aplikacijo izdelamo v TIA Portalu (dostopne so knjižnice proizvajalcev robotov KUKA, Yaskawa, Denso in Stäubli). Možne so tudi povezave s simulatorjem za optični vid, tehtalnimi moduli itd.
Povezava PLCSIM Advanced-NX MCD – Omogoča nam validacijo in verifikacijo modela v fizikalnem prostoru. Uporabljamo lahko tehnološke objekte, vendar ne moremo popolnoma simulirati I/O vhodov in izhodov. To je deloma mogoče z dodatno instanco (tako imenujemo virtualne krmilnike) na PLCSIM Advanced, na katerem priredimo lastno aplikacijo, ki se odziva na osnovni program. Pri tehnoloških objektih lahko uporabljamo virtualne osi, katerih pozicijo delimo z NX MCD. Tako je mogoče simulirati premikanje osi SCARA robota v virtualnem 3D modelu, če želimo preveriti, ali pride med dvema robotskima rokama do trka. Težavo povzroča množica signalov in telegramov, zato je za večje primere priporočena uporaba programa SIMIT.
 Povezava PLCSIM Advanced–SIMIT-NX MCD – Ta povezava nam omogoča, da SIMIT iz krmilnika prebere izhode, vhode, telegrame in ustvari »PIP Outputs« (process image partition of the outputs) ter nato posreduje »setpointe« oz. nastavljene vrednosti položaja v NX MCD (npr. pozicijo, hitrost itd.). NX MCD pošlje izračunane dejanske vrednosti (npr. pravo vrednost hitrosti) na SIMIT. SIMIT nato izračuna obnašanje naprave z uporabo pogona in jih nato pošlje na vhode krmilnika »PIP Inputs«. Pri tem nam ni treba uporabljati virtualnih osi v projektu v TIA Portalu, saj SIMIT lahko prebere telegram iz PLCSIM Advanced. Tako lahko v celoti uporabljamo vse tehnološke objekte in zaradi povratne zanke izvedemo optimizacijo PID regulatorjev.
Povezava PLCSIM Advanced–SIMIT-NX MCD – Ta povezava nam omogoča, da SIMIT iz krmilnika prebere izhode, vhode, telegrame in ustvari »PIP Outputs« (process image partition of the outputs) ter nato posreduje »setpointe« oz. nastavljene vrednosti položaja v NX MCD (npr. pozicijo, hitrost itd.). NX MCD pošlje izračunane dejanske vrednosti (npr. pravo vrednost hitrosti) na SIMIT. SIMIT nato izračuna obnašanje naprave z uporabo pogona in jih nato pošlje na vhode krmilnika »PIP Inputs«. Pri tem nam ni treba uporabljati virtualnih osi v projektu v TIA Portalu, saj SIMIT lahko prebere telegram iz PLCSIM Advanced. Tako lahko v celoti uporabljamo vse tehnološke objekte in zaradi povratne zanke izvedemo optimizacijo PID regulatorjev.
»Hardware in the loop« in »Software in the loop«
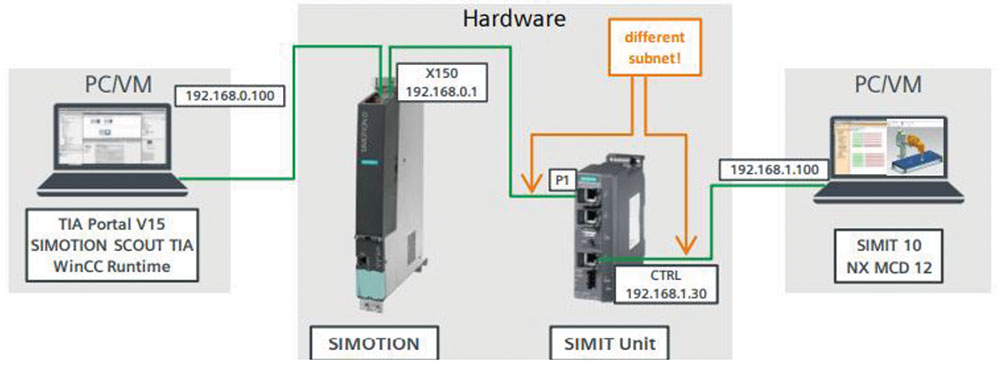
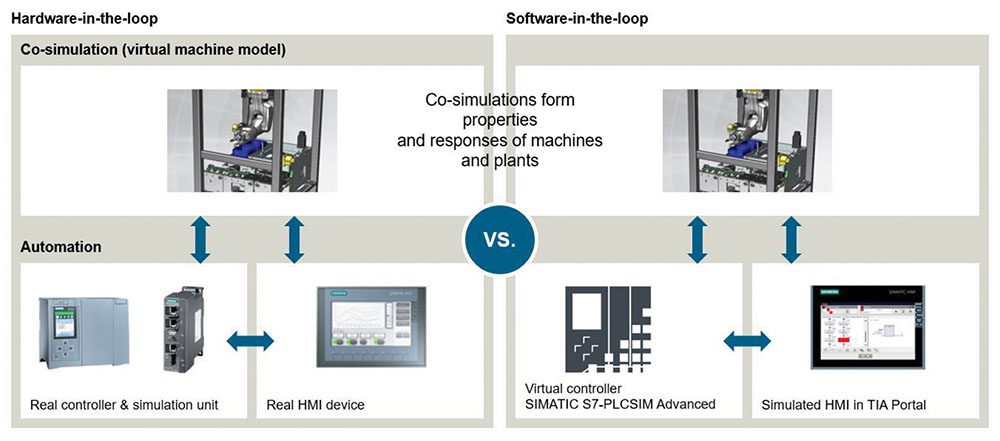
V osnovi delimo možnosti simulacije na »Hardware in the loop« in »Software in the loop«. Pri »Software in the loop« lahko uporabimo virtualni krmilnik, to nam omogoča PLCSIM Advanced za krmilnike S7-1500. Tu je krmilnik simuliran, »virtualni čas« pa lahko za analizo programa upočasnimo. Druga možnost izvedbe je preko »Hardware in the loop«, kjer preko pomožne enote SIMIT Unit povežemo tudi realne krmilnike, kot so: S7-1500, S7-1200, S7-300, S7-400, SIMOTION in krmilniki drugih proizvajalcev, in periferijo, ki komunicirajo preko povezave PROFINET.
PLCSIM Advance 2.0
 PLCSIM Advanced omogoča simulacijo krmilnikov serije S7-1500/ET 200SP in povezavo z realno HMI/SCADA napravo ali s simulacijo HMI z virtualnim krmilnikom.
PLCSIM Advanced omogoča simulacijo krmilnikov serije S7-1500/ET 200SP in povezavo z realno HMI/SCADA napravo ali s simulacijo HMI z virtualnim krmilnikom.
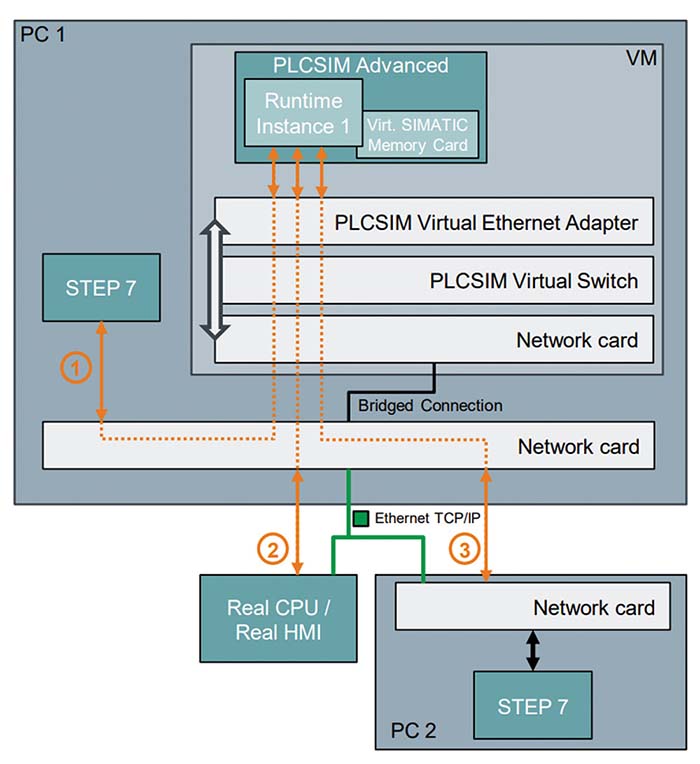
V projektu lahko povežemo do 16 virtualnih krmilnikov oz. t. i. instanc. Instanco lahko povežemo z drugim virtualnim krmilnikom ali ustvarimo povezavo z realnim preko TCP/IP komunikacije. V primerjavi s klasičnim PLCSIM nam PLCSIM Advanced omogoča simulacijo spletnega strežnika, OPC UA Serverja, Traces, Motion, simulacijo pomnilniške kartice, organizacijskih objektov za diagnostiko v TIA Portalu, komunikacijo S7, API (Application Programming Interface) in »Know-How« zaščitenih programskih blokov.
SIMIT
SIMIT je simulacijsko okolje, kjer ponazorimo karakteristično obnašanje naprav, senzorike, pogonov, enkoderjev, vključno z vsemi telegrami in komunikacijami (PLCSIM Advanced, PROFINET, PROFIBUS, OPC UA, OPC DA, MATLAB …). Poleg testiranja naprav v diskretni avtomatizaciji omogoča tudi testiranje naprav v procesni industriji, npr. reaktorskih posod, v katerih nastopajo različne veličine, kot so tlak, temperatura, pretoki, karakteristike črpalk, prestop toplote pri prenosnikih toplote in plaščih reaktorskih posod in mnoge druge. To pomeni, da ob uporabi SIMIT-a ni treba spreminjati ali prilagajati uporabniškega programa v TIA Portalu.
 Prednost programa SIMIT je, da ni treba ročno dodajati signalov. SIMIT signale avtomatsko prebere iz projekta v TIA Portalu in jih pripravi za uporabo. Vse, kar vsebuje projekt v TIA Portalu, je vključeno tudi v SIMIT-u. Sledi samo grafično povezovanje oz. t. i. »drag & drop«. Lahko dodamo ločene fizikalne lastnosti, ki jih želimo simulirati, oz. pripravimo simulacijsko okolje in scenarije, npr. za preizkušanje bodočih operaterjev postrojenj. Kolikor projekt vsebuje telegram, lahko preko njega pošiljamo želeno vrednost (setpoint), hkrati pa dobimo povratno informacijo o realni vrednosti oz. poziciji skupaj v interakciji s fizikalnim modelom v NX MCD. Tako pa lahko preverimo tudi svoje izračune pri dimenzioniranju svojih naprav (npr. moč in navor pri elektromotorjih).
Prednost programa SIMIT je, da ni treba ročno dodajati signalov. SIMIT signale avtomatsko prebere iz projekta v TIA Portalu in jih pripravi za uporabo. Vse, kar vsebuje projekt v TIA Portalu, je vključeno tudi v SIMIT-u. Sledi samo grafično povezovanje oz. t. i. »drag & drop«. Lahko dodamo ločene fizikalne lastnosti, ki jih želimo simulirati, oz. pripravimo simulacijsko okolje in scenarije, npr. za preizkušanje bodočih operaterjev postrojenj. Kolikor projekt vsebuje telegram, lahko preko njega pošiljamo želeno vrednost (setpoint), hkrati pa dobimo povratno informacijo o realni vrednosti oz. poziciji skupaj v interakciji s fizikalnim modelom v NX MCD. Tako pa lahko preverimo tudi svoje izračune pri dimenzioniranju svojih naprav (npr. moč in navor pri elektromotorjih).
SIMIT že vključuje sledeče knjižnice za komunikacijo s krmilniki SIMATIC in SINUMERIK: Vsebuje telegrame za nadzor hitrosti 1, 2, 3, telegrame dinamičnega servokrmiljenja 5, 6, telegrame PROFISafe 30, 31, 32, telegrame SIMODRIVE 611U, telegrame za nadzor hitrosti 102, 103, telegrame za dinamično servokontrolo 105, 106, proizvajalce specifičnih telegramov (telegram 370) in tehtalne module SIWAREX, RFID in druge.
NX Mechatronics Concept Designer (MCD)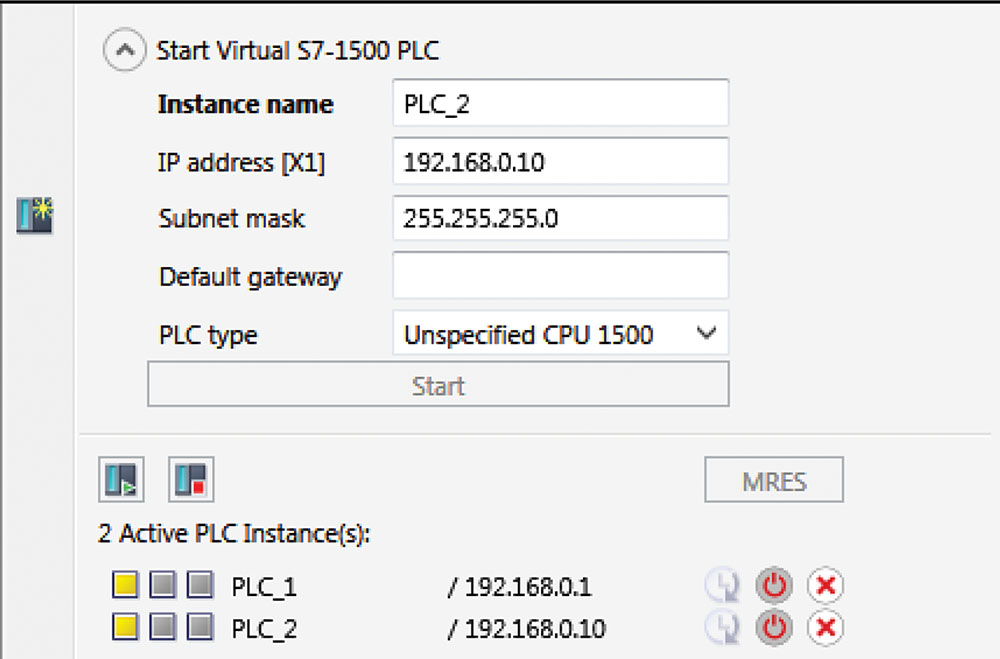 NX MCD je program za interaktivno načrtovanje in simulacijo kompleksnega gibanja elektro-mehanskih sistemov. Podpira načrtovanja strojev, vključno z mehanskimi, električnimi, fluidnimi modeli, v povezavi s programom, ki teče na krmilniku. Tako nam omogoča analizo trkov in ostalih fizikalnih lastnosti, ki jih podpira NX MCD.
NX MCD je program za interaktivno načrtovanje in simulacijo kompleksnega gibanja elektro-mehanskih sistemov. Podpira načrtovanja strojev, vključno z mehanskimi, električnimi, fluidnimi modeli, v povezavi s programom, ki teče na krmilniku. Tako nam omogoča analizo trkov in ostalih fizikalnih lastnosti, ki jih podpira NX MCD.
NX MCD poveže vse dele v eni sami datoteki. Poleg programa za modeliranje Siemens NX lahko uvozimo tudi kosovnico iz programov CATIA, SolidWorks, Creo, formata STEP itd. Omogoča nam dodajanje pogonov, tekočih trakov, nadzor položaja, hitrosti, hidravlike, hidravličnih ali pnevmatskih cilindrov in ventilov ter različne senzorike (položajnih stikal, merilnikov hitrosti, pospeškov, razdalje, trkov itd.).
 Vključena so sledeča orodja za povezovanje osi:
Vključena so sledeča orodja za povezovanje osi:
- Gear – Povezuje gibanje dveh osi tako, da se gibljeta v fiksnem razmerju.
- Mechanical Cam – Povezuje gibanje dveh osi tako, da se premikata v skladu s profilom gibanja. Reakcijska sila gibanja se prenese nazaj na glavno os (slika 13a).
- Electronic Cam- Povezuje gibanje dveh osi tako, da se premikata v skladu s profilom gibanja ali odmičnim profilom.
- Motion Profile – Ustvari profil gibanja, ki je funkcija med glavno (1) in podrejeno osjo (2) (slika 13b).
- Cam Profile – Ustvari profil gibanja, ki se uporablja za ustvarjanje razmerja gibanja med dvema osema. Segmenti gibanja se uporabljajo za profil Cam, da ustvarite želeno razmerje.
- V današnjem vse bolj konkurenčnem okolju digitalizacija postaja nujna za obstoj. Orodja za simulacijo nam omogočajo pot do napredka in novih naprednih rešitev.
Za dodatne informacije se obrnite na avtorja članka.
Informacije: Andrej Lazovič
Siemens d.o.o.
Letališka cesta 29c
1000 Ljubljana
andrej.lazovic@siemens.com
www.siemens.com

{kind=link}