![]()
Resolverji so dajalniki pozicije, ki se jih večinoma uporablja za vgradnjo v servomotorje in za kasnejše predelave strojev. V določenih primerih je koristno vedeti, kako lahko sami izračunamo pozicijo, ki jo prikazuje resolver. Končnih rešitev je več. V nadaljevanju je na grobo predstavljeno, kako najti rešitev, ki bo za nas najbolj enostavna.
 Obstaja več vrst resolverjev. Največkrat se srečujemo s krmilnimi resolverji z ali brez zunanjega ohišja, ki jih prepoznamo po značilni zgradbi in šestih priključkih z značilno barvno kodo (glej Sliko 1). Uporablja se jih za vgradnjo v servomotorje, ki delujejo v zahtevnem okolju, ker so zelo robustni in odporni na zunanje vplive. Prav tako se jih uporablja za kasnejše predelave strojev, kjer potrebujemo informacije o poziciji.
Obstaja več vrst resolverjev. Največkrat se srečujemo s krmilnimi resolverji z ali brez zunanjega ohišja, ki jih prepoznamo po značilni zgradbi in šestih priključkih z značilno barvno kodo (glej Sliko 1). Uporablja se jih za vgradnjo v servomotorje, ki delujejo v zahtevnem okolju, ker so zelo robustni in odporni na zunanje vplive. Prav tako se jih uporablja za kasnejše predelave strojev, kjer potrebujemo informacije o poziciji.
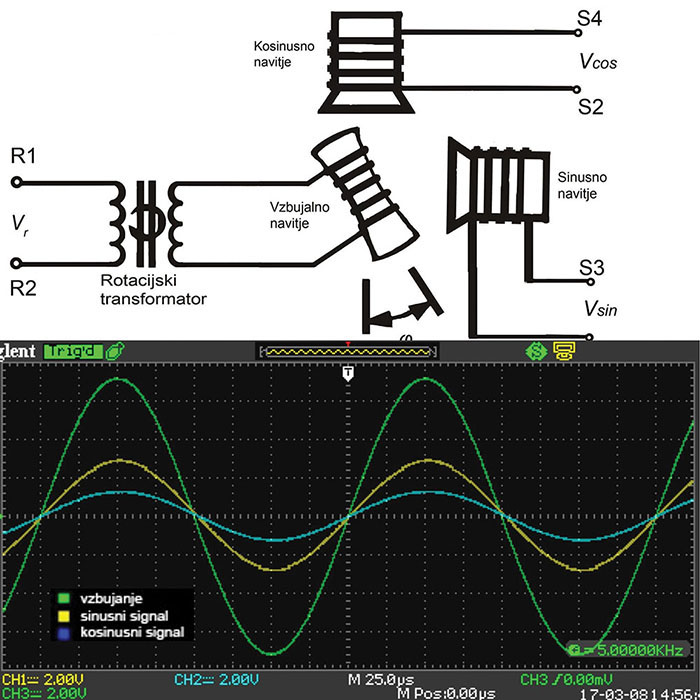
Resolver je rotacijski transformator, ki deluje po principu elektromagnetne indukcije. Zelo poenostavljeno povedano so to tri navitja, kjer eno navitje vzbujamo, na drugih dveh pa merimo inducirano napetost. Na spodnji sliki (Slika 2) je shematski prikaz navitij in prikaz vzbujalne napetosti (zelen signal) ter obeh induciranih napetosti (moder in rumen signal) na tuljavah resolverja s pomočjo osciloskopa. Ker sta navitji, na katerih merimo inducirano napetost, med seboj zamaknjeni, je vsak položaj v celotnem obratu enoznačno definiran z razmerjem izmerjenih napetosti. Resolver se zaradi te karakteristike uvršča med absolutne dajalnike pozicije, saj bo ob naslednjem vklopu, za razliko od inkrementalnih dajalnikov, točno sporočal svojo pozicijo. Njegova uporaba upada, ker deluje po principu analognih signalov. Danes se namreč vse bolj nagibamo k digitalnim rešitvam, kjer se izogibamo analognim signalom.
Za izračun pozicije so potrebne v osnovi tri stvari. Resolver je najprej treba napajati z izmenično napetostjo določene frekvence in amplitude. V večini primerov se za to uporablja funkcijske generatorje. Sledi zajem izhodnih signalov resolverja. Za zajem signalov obstaja veliko rešitev, zato poiščemo sebi najprimernejšo. Največkrat se v te namene uporabi osciloskop, vhodno-izhodne naprave v obliki merilnih kartic ali kar mikrokrmilnike. Pri uporabi mikrokrmilnikov je treba biti pazljiv, saj v večini primerov niso prilagojeni za negativne napetosti, ki se pojavljajo na izhodu resolverja. Nadaljnja obdelava zajetih signalov je odvisna od naprave za zajem, večinoma pa računski del prevzame računalnik ali mikrokrmilnik. Pozicijo se izračuna iz razmerja izmerjenih induciranih napetosti obeh navitij po spodnji enačbi (Enačba 1). Dobljen rezultat je v radianih, zato ga običajno pretvorimo v stopinje zaradi boljše predstave.
V enačbi je φ – kot zasuka, Vsin – sinusna napetost in Vcos – kosinusna napetost
![]()
Enačba 1: Izračun kota zasuka
V podjetju Matris d.o.o. smo za lastne potrebe razvili že dve rešitvi, ki omogočata neodvisno preverjanje delovanja resolverja in spremljanje pozicije resolverja predvsem za servisne namene. Pri prvi rešitvi gre za prenosno napravo, ki omogoča uporabo na terenu. Prav pride, kadar je demontaža motorja zelo otežena, saj lahko v določenih primerih opravimo analizo pred demontažo ali pa ponovno nastavitev resolverja v motorju in se s tem izognemo celotni demontaži. Druga rešitev je preprosto vezje, primerno za vgradnjo, ki je prilagojeno za uporabo s PLC-ji (programirljivimi logičnimi krmilniki).
 Svojo prvo rešitev smo zaradi škatlaste oblike in barve poimenovali kar Blackbox (glej Sliko 3). V njej se skriva vhodno-izhodna naprava z USB priključkom, ki hkrati služi za napajanje in komunikacijo z računalnikom. Z njo zajemamo izhodne signale resolverja. Poleg nje je notri še majhen funkcijski generator za prilagajanje napajanja za različne resolverje. Za potrebe napajanja funkcijskega generatorja so v notranjosti baterije, za povezljivost z resolverjem pa je prisoten eden od standardnih konektorjev, na katerega priklopimo namenski kabel. Za izračun in prikaz pozicije resolverja se uporablja računalnik in namenska programska oprema.
Svojo prvo rešitev smo zaradi škatlaste oblike in barve poimenovali kar Blackbox (glej Sliko 3). V njej se skriva vhodno-izhodna naprava z USB priključkom, ki hkrati služi za napajanje in komunikacijo z računalnikom. Z njo zajemamo izhodne signale resolverja. Poleg nje je notri še majhen funkcijski generator za prilagajanje napajanja za različne resolverje. Za potrebe napajanja funkcijskega generatorja so v notranjosti baterije, za povezljivost z resolverjem pa je prisoten eden od standardnih konektorjev, na katerega priklopimo namenski kabel. Za izračun in prikaz pozicije resolverja se uporablja računalnik in namenska programska oprema.
Druga rešitev je vgrajena v napravo, ki je namenjena hitremu preizkusu in analizi določenih servomotorjev, ker je prilagojena za stranko. Njen namen je skrajševanje zastojev, saj z njeno uporabo lahko ugotovijo, ali je okvara prisotna na motorju ali kje drugje na stroju, in se s tem izognejo zamudnemu pošiljanju motorja na pregled drugam. Rešitev je izvedena v obliki dveh tiskanih vezij (Slika 4). Prvo vezje skrbi za napajanje, saj s pomočjo namenskega čipa generira napajanje za resolver in drugo vezje. Z drugim vezjem zajemamo signale z resolverja in jih v prilagojeni obliki peljemo na PLC. Na namenskem zaslonu nato prikazujemo pozicijo, ki jo je v tem primeru izračunal PLC.
Zaključek Izračun in prikaz pozicije resolverja nam dostikrat pride prav pri servisu in vzdrževanju servomotorjev z vgrajenimi resoverji in strojev z dograjenimi resolverji. Prav tako lahko za lastne potrebe uporabimo resolver iz starega servomotorja za novo aplikacijo, kjer potrebujemo spremljanje pozicije. V članku smo poskusili predstaviti način, kako poiskati najlažjo rešitev, ki bi vsakomur omogočila lasten izračun pozicije resolverja, in ob tem prikazali dva primera.
Izračun in prikaz pozicije resolverja nam dostikrat pride prav pri servisu in vzdrževanju servomotorjev z vgrajenimi resoverji in strojev z dograjenimi resolverji. Prav tako lahko za lastne potrebe uporabimo resolver iz starega servomotorja za novo aplikacijo, kjer potrebujemo spremljanje pozicije. V članku smo poskusili predstaviti način, kako poiskati najlažjo rešitev, ki bi vsakomur omogočila lasten izračun pozicije resolverja, in ob tem prikazali dva primera.
Prva rešitev bi v optimizirani obliki omogočala vsem serviserjem in vzdrževalcem menjavo ležajev na servomotorjih z vgrajenim resolverjem. Pri servisu takega servomotorja je namreč kjučnega pomena nastavitev resolverja po koncu servisnega postopka. Brez pravilne nastavitve resolverja servomotor ne bo pravilno deloval.
Viri
[1] Interno gradivo podjetja Matris d.o.o.
[2] K. Bizjak: Razvoj prenosne naprave za nastavljanje resolverjev: magistrsko delo magistrskega študijskega programa II. stopnje STROJNIŠTVO. Junij 2017.
[3] Moog Components Group Inc.: Synchro and Resolver Engineering Handbook. Moog Components Group Inc., Blackburg, 2004. Dostopno na: http://www.moog.com/literature/MCG/synchrohbook.pdf, ogled: 6. 2. 2017.
[4] Precision Resolver to – Digital Converter:Measures Angular Position and Velocity. V: Analog Dialogue. Dostopno na: http://www.analog.com/en/analogdialogue/articles/precision-rtdc-measures-angular-position-and-velocity.html, ogled: 11. 2. 2017.
[5] L. R. Norris: Servo Motor Operation & Testing. Samozaložba, Indiana, 2011.
[6] J. Peternelj: Pretvornik izhodnih signalov magnetnega senzorja položaja: diplomsko delo. Ljubljana, 2014.
Matris d.o.o.
Jelenčeva ulica 1
4000 Kranj, Slovenija
+386 (4) 29 26 900
info@matris.eu
https://matris.eu

{kind=link}