![]()
Podjetje LAPP kot strokovnjak na področju kablov in kabelskih sistemov utira svojo pot tudi v industrijski komunikaciji.
 Smo namreč vodilni na področjih Avtomatizacije, Robotike, Prehrambene in pakirne industrije e-mobilnosti,… Tokrat bomo predstavili komunikacijo robota v njegovem delovnem okolju.
Smo namreč vodilni na področjih Avtomatizacije, Robotike, Prehrambene in pakirne industrije e-mobilnosti,… Tokrat bomo predstavili komunikacijo robota v njegovem delovnem okolju.
Robot je multifunkcijska naprava, ki ima vsaj dve osi in jo lahko programiramo za naše potrebe. Trg delimo na tri segmente:
- proizvajalec robotov
- integrator robotov
- vzdrževanje in popravilo robotov
Kot vsaka avtomatizirana aplikacija morajo tudi roboti komunicirati med seboj oz. ostalo periferijo, ki je del aplikacije. Torej potrebujemo industrijsko mrežo.
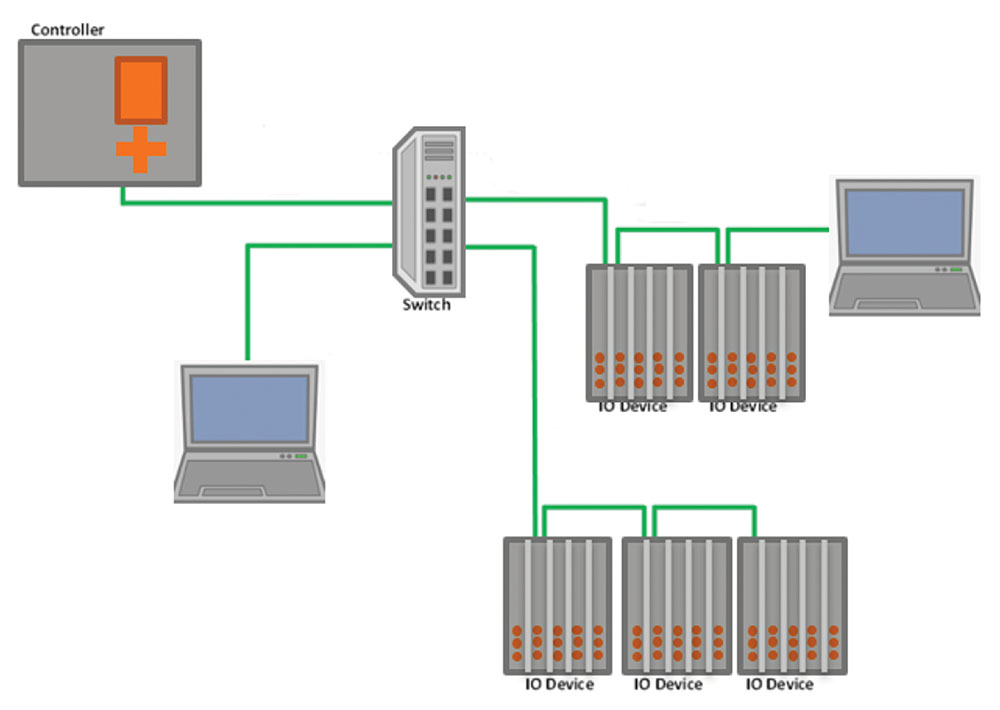
Delimo jih na centralizirane in decentralizirane mreže (slika 1).
Decentralizirana rešitev je trenutno najbolj razširjena v industriji, redko kdo se še odloči za centralizirano rešitev, saj to predstavlja ogromno naporov in stroškov pri polaganju kilometrov kablov. Prav tako otežuje reševanje okvar, saj smo primorani menjati celotno linijo.
 Pri centralizirani rešitvi so PLC inženirji vse senzor/aktuator povezave peljali iz proizvodnje direktno do PLC-jev (PLC – Programabilni Logični Krmilnik). Danes pa lahko vgradimo vhodne in izhodne module v neposredno bližino senzorjev in aktuatorjev v proizvodni hali in jih povežemo s primernimi senzor/aktuator kabli krajših dolžin. Drugi konec pa povežemo s kontrolno sobo s samo enim kablom. To lahko dosežemo tako, da med kontrolno sobo, kjer se sedaj nahaja naš PLC in proizvodnjo vgradimo še I/O napravo.
Pri centralizirani rešitvi so PLC inženirji vse senzor/aktuator povezave peljali iz proizvodnje direktno do PLC-jev (PLC – Programabilni Logični Krmilnik). Danes pa lahko vgradimo vhodne in izhodne module v neposredno bližino senzorjev in aktuatorjev v proizvodni hali in jih povežemo s primernimi senzor/aktuator kabli krajših dolžin. Drugi konec pa povežemo s kontrolno sobo s samo enim kablom. To lahko dosežemo tako, da med kontrolno sobo, kjer se sedaj nahaja naš PLC in proizvodnjo vgradimo še I/O napravo.
I/O napravo (najbolj razširjena ET200SP Siemens) povežemo na eni strani s senzorji in aktuatorji direktno v tovarni, povežemo vse naprave z I/O karticami na enoti ter na drugi strani povežemo oddaljeno I/O napravo s PLC-jem in to le z enim kablom. Odvisno od projektov lahko uporabimo PROFINET, PROFIBUS ali katerikoli drugi tip industrijskih topologij.
INDUSTRIJSKA MREŽA s PROFINET topologijo
PROFINET uporablja polno protokolov, da zapolni model OSI (glej sliko 3). Vsak od teh protokolov ima nekaj podatkov, ki jih je treba poslati med komunikacijskimi partnerji.
Najbolj temeljna plast je fizična plast torej električna. Ne glede na to, ali gre za elektrone, ki se pretakajo po žici, radijske valove, ki se premikajo po zraku, ali fotone, ki potujejo skozi optična vlakna.
 Obstaja več načinov kako izvesti fizično plast. Protokol PROFINET uporablja plasti OSI modela že desetletja. Programski paket IEEE 802 zajema to, kar za nas predstavlja žični Ethernet (802.3) in brezžični Ethernet (802.11).
Obstaja več načinov kako izvesti fizično plast. Protokol PROFINET uporablja plasti OSI modela že desetletja. Programski paket IEEE 802 zajema to, kar za nas predstavlja žični Ethernet (802.3) in brezžični Ethernet (802.11).
PROFINET je določil že znan standard 802.3 Ethernet za plast podatkovne povezave. To pomeni, da ima vsaka naprava PROFINET svoj MAC (Media Access Control) naslov.
PROFINET prav tako uporablja za nekatere komunikacije protokol IP (Internet Protocol), UDP (User Datagram Protocol) in RPC (Remote Procedure Call). Toda ti protokoli prihajajo z dodatnimi zahtevami (več bajtov na žici, več časa obdelave pri viru in cilju), zato jih PROFINET v uporabo pokliče le, kadar je to nujno potrebno.
Imajo pa nekaj relevantnih prednosti kot so vse informacije o naslovih, ki so zapakirane v paket UDP / IP.
MAC, IP naslove in vrata UDP lahko uporabimo za preklop, usmerjanje in obdelavo podatkov PROFINET.
PROFINET mreža je sestavljena iz:
- Krmilnik (v PROFIBUS terminologiji to predstavlja class-1 master)
- PLC = Programabilni Logični Krmilnik
- DCS = Distribucijski Kontrolni Sistem
- PAC = Programabilni Krmilnik za avtomatizacijo
- Naprave / Stikala (v PROFIBUS terminologiji to predstavlja slave)
- I/O bloki, sistemi nadzora, RFID čitalci, pogoni, procesni instrumenti, proksiji ali celo drugi krmilniki ki so povezani v mrežo PROFINET
- Nadzorniki (opcijsko)
- To so programabilne naprave, PC-ji ali vmesniki človek – stroj (HMI – Human Machine Interface) ki se uporabljajo za diagnostiko.
Osnovna naloga topologije PROFINET je hitra in deterministična izmenjava podatkov. Se pravi podatki pridejo na cilj takrat, ko se jih potrebuje. Hitrosti določajo aplikacije, procesni instrumenti se posodobijo v stotinah milisekunde (tovarne dosegajo <10 milisekund). Še bolj zahtevna pa je sinhronizacija nadzora gibanja.
Ostale topologije in protokoli niso tako hitri in deterministični ali pa spadajo v zaprte mreže.
- Modbus TCP: uporablja TCP (Transmision Control Protocol), ki zahteva da je virtualna povezava vzpostavljena med dvema napravama, tako morajo sporočila – podatki skozi TCP/IP (Transmision Control Protocol / Internet Protocol) sklad.
- Ethernet/IP: Uporablja UDP (User Datagram Protocol), taka sporočila – podatki potekajo skozi UDP/IP sklad. Čas skozi sklad je variabilen, s tem se zmanjša hitrost in posledično determinističnost.
- EtherCAT je deterministična ampak zaprta mreža.
 PROFINET promet
PROFINET promet
- poleg sporočil – podatkov se izmenjujejo tudi kvaliteta in opravljanje informacij. Torej ne dobimo samo prenosa podatkov, ampak razpolagamo tudi z informacijo, če je podatek prispel nepoškodovan. S tem dosežemo proaktivno vzdrževanje, podatke pa lahko prenašamo s pred-definiranim režimom.
Kako PROFINET prenaša informacije?
- Poznamo kakšne informacije želimo prenašati?
- Ali jih potrebujemo takoj?
- So varnostno kritične?
- Gre za velike pakete, ki jih moramo poslati v enem kosu?
 Za različne scenarije imamo različne rešitve imenovane komunikacijski kanali:
Za različne scenarije imamo različne rešitve imenovane komunikacijski kanali:
- Realni čas (RT – Real-Time)
- Ne-realni čas (NRT – Non-Real-Time)
- Izohroni realni čas (IRT – Isochronous Real-Time)
RT
Ko govorimo o industrijskih protokolih za avtomatizacijo moramo biti v realnem času. Okvirji se izmenjujejo v RT kanalu z majhno zakasnitvijo in nizkimi variancami (jitter) . Slaba stran tega je, da nimamo IP naslova, zato se RT okvirji ne morejo prenašati med lokalno mrežo (LAN – Local Aera Network).
NRT
Se uporablja za diagnostična orodja potrebna za dostop do PROFINET naprav, da lahko vodijo zapise o stanju mreže PROFINET. Uporablja se v vseh plasteh OSI modela (glej sliko 3) in ima IP naslov. Tako lahko PROFINET nadzorniki dostopajo do naprav navzkrižno ali celo preko interneta. Slaba stran NRT je, da prihaja do večjih zakasnitev in varianc (jitter).
IRT
Znano je, da stikala lahko delujejo kot prometna križišča, ki usmerjajo več tokov podatkov do ene same povezave. Ravno tako, kot gneča v križiščih, lahko tudi stikala povzročijo nepričakovane zamude v prometu podatkov.
Razredi Realnih časov (RT) v PROFINETu
PROFINET ima veliko razredov:
- Razredi skladnosti (conformance classes)
- Razredi redundance medijev (media redundancy classes)
- Itd..
Pozornost bomo namenili Razredom realih časov in njihovem delovanju v PROFINET-u.
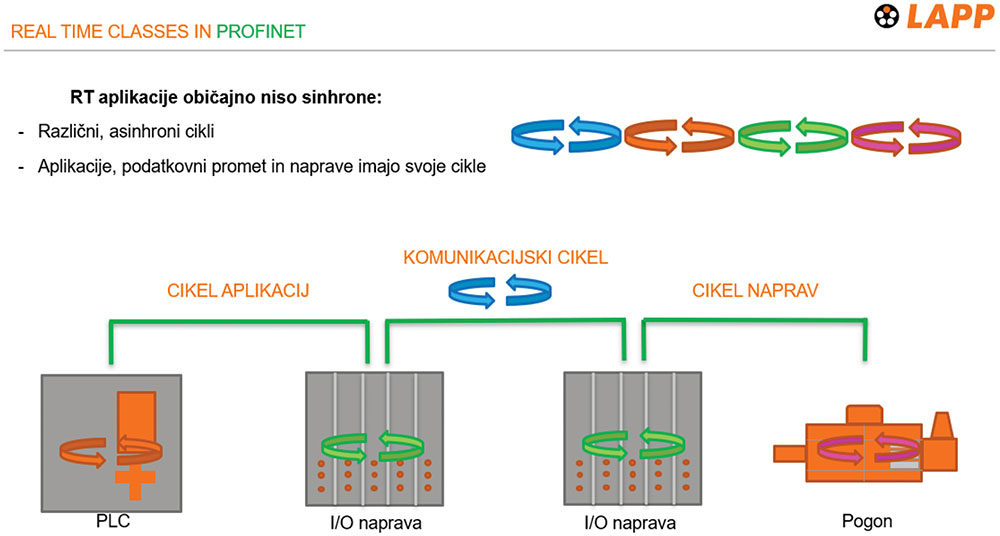
Razredi RT določajo:
- Uporabljene storitve in delovanje protokola v realnem času, če je komunikacija (časovno) sinhronizirana ali asinhronizirana med napravami.
- Katera pot je izbrana v napravi ali mreži in ali bo morda potrebna strojna podpora (kot recimo PROFINET ASIC (Applicaton Specific Integrated Circuit – integrirano vezje specificirano za aplikacijo) ali FPGA (Field Programmable Gate Arrays – programabilni nizi vrat)
- Vse PROFINET naprave morajo podpirati RT, kar običajno pomeni okoli 250 mikrosekund do 10 milisekund časa posodobitve z < 100 mikrosekund varianc (jitter), podatki pa so poslani asinhrono.
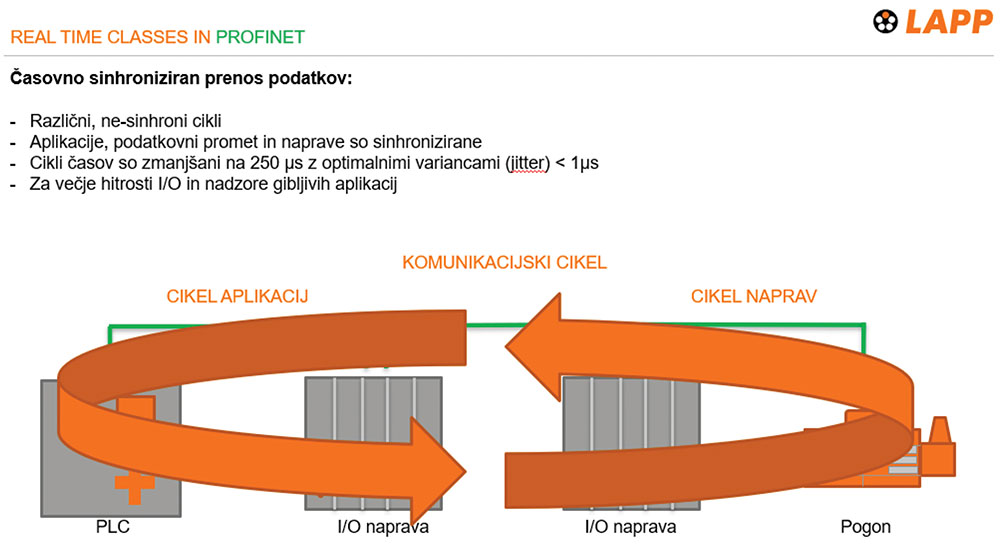
Časovno sinhroniziran prenos podatkov
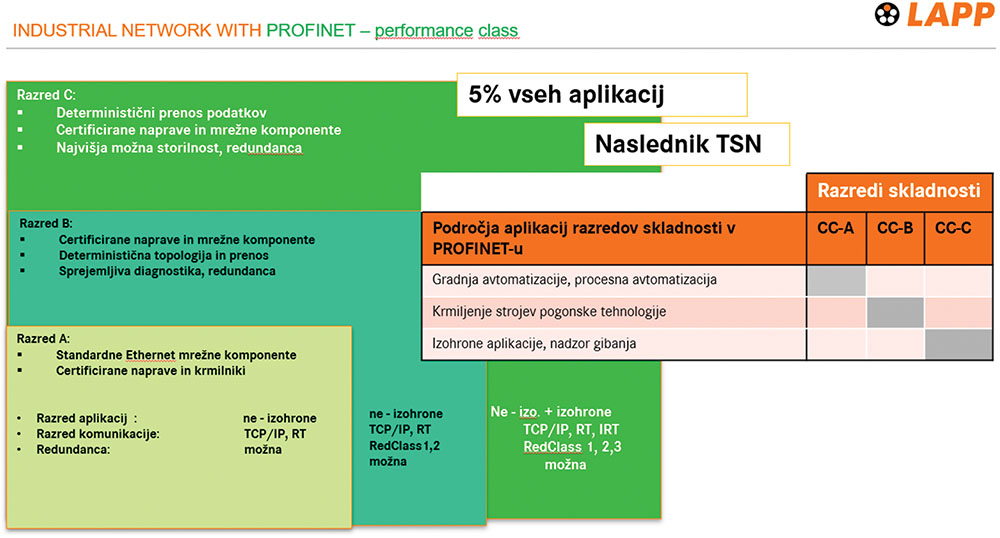
Ko govorimo o RT, moramo razumeti, da se uporablja poseben EtherType (0x8892) za PROFINET, ki predstavlja RT sporočilo z uporabo standardnih Ethernet komponent in omogoča preskakovanje TCP/IP plasti za podatkovni proces aplikacij RT. Za večino aplikacij bo to delovalo v redu. To velja tudi za razrede skladnosti CC-A in CC-B.
V IRT je možno podpiranje IRT (Izohroni realni čas), zato so časi ciklov običajno <1 milisekunde z 1 mikrosekundo varianc (jitter). Uporabljajo se v aplikacijah za nadzor gibanja, kjer več naprav potrebuje časovno sinhronizacijo in višjo stopnjo zanesljivosti z uporabo rezervacije pasovne širine in urnika.
V razredu skladnosti C (CC-C) naprave podpirajo IRT in RT. Omogoča tudi storitev RT z uporabo UDP/IP (User Datagram Protocol / Intrenet Protocol). Ne poznamo dosti proizvajalcev, ki bi to uporabljali. To pa zaradi tega ker je RT/IRT dosti bolj robusten, zanesljiv in enostavnejši za uporabo.
Z UDP/IP se nam lahko zgodi več zamud in nepotrebnih stroškov. Seveda pa lahko RT okvirje prenašamo tudi z usmernikom (router).
Večina PROFINET prometa poteka preko stikal samo na delu sistema PROFINET, saj RT/IRT uporabljajo UDP ali TCP, zato se jih lahko uporabi preko usmernika in stikala (npr.: konfiguracija in diagnostika). Za razvijalce so RT razredi določeni v GSD datoteki ali v konfiguracijskem orodju krmilnikov (tag = SupportedRT_Classes).
Če povzamemo imamo na voljo:
- RT_CLASS_1 = RT (za razred skladnosti A in B)
- RT_CLASS_2 = IRT (danes ni pogost za uporabo)
- RT_CLASS_3 = IRT (uporablja se, kadar so potrebne aplikacije za gibanje ali visoke hitrosti, razred skladnosti C)
Povzetek
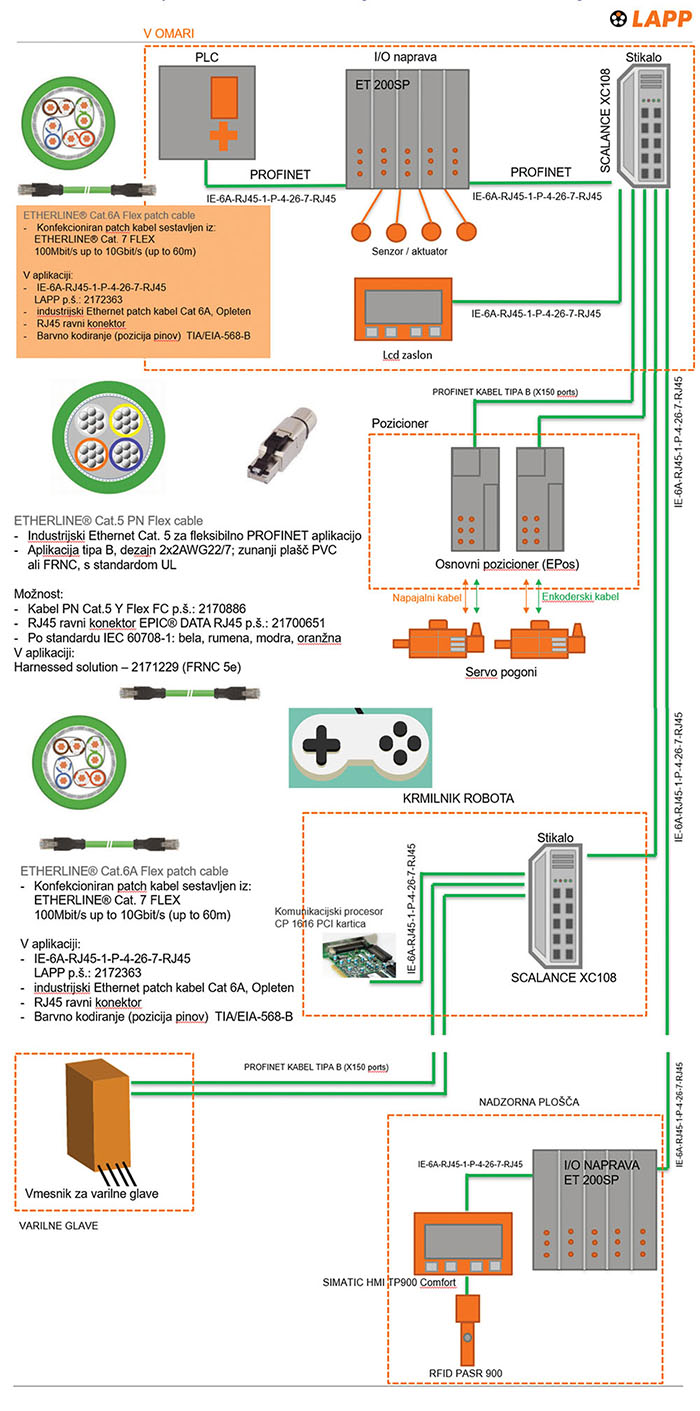
Naša enostavna aplikacija je torej v razredu skladnosti CC-B in RT_CLASS_1. Povezave, ki smo jih uporabili, si lahko pogledate na primeru slika 7. Ne smemo pozabiti na barvno kodiranje oz. določitev pinov. Mi smo uporabili standard TIA/EIA – 586 – B, ki velja za najbolj uporabljeno shemo ožičenja. Ujema se s starejšo barvno kodo 258A in ustreza trenutnim in prihodnjim potrebam. Več o TIA shemah oz. barvnih kodiranjih, standardih, ter kategorijah kablov pa kdaj drugič.
Lapp, d.o.o.
Limbuška cesta 2
2341 Limbuš
Tel.: +386(0)2 421 35 53
E-pošta: simon.vrbnjak@lappslovenia.com
www.lappslovenija.si

{kind=link}