![]()
Za profesorja Jianguo Zhao je hobotnica ena izmed najelegantnejših naprav v naravi: je spretna, prilagodljive oblike, mehka in se lahko premika skozi tesne prostore s hitrim krčenjem mišic.
Raziskovalec strojništva na Univerzi v Koloradu je svoje občudovanje preusmeril v akcijo, saj vodi laboratorij, ki preizkuša kompleksnosti in izzive prilagodljive robotike. Zdaj je skupaj s svojimi študenti prikazal nov način, kako omogočiti zapletene gibe v mehkih robotih, ki jih navdihujejo biološki čudeži, kamor spadajo tudi hobotnice.
 Številni raziskovalci robotike so se posvetili oblikovanju robotov iz mehkih, skladnih materialov, da bi zagotovili varnost, odpornost na poškodbe in večjo sposobnost obstoja v svetu, ki ga oblikuje človek. Toda napredek pri mehkih robotih je bil omejen z njihovimi najpomembnejšimi deli – inženirji jih imenujejo aktuatorji, gre pa za sestavne dele, ki premikajo in nadzirajo gibanje. Pri ljudeh in živalih so aktuatorji mišice, ki se odzivajo na dražljaje in se upogibajo in krčijo v več smereh.
Številni raziskovalci robotike so se posvetili oblikovanju robotov iz mehkih, skladnih materialov, da bi zagotovili varnost, odpornost na poškodbe in večjo sposobnost obstoja v svetu, ki ga oblikuje človek. Toda napredek pri mehkih robotih je bil omejen z njihovimi najpomembnejšimi deli – inženirji jih imenujejo aktuatorji, gre pa za sestavne dele, ki premikajo in nadzirajo gibanje. Pri ljudeh in živalih so aktuatorji mišice, ki se odzivajo na dražljaje in se upogibajo in krčijo v več smereh.
V reviji Soft Robotics Zhaova skupina opisuje razmeroma novo napravo, imenovano prepleten tuljavni (twisted-and-coiled) aktuator, ki so jo prvič uporabili za ustvarjanje programiranega gibanja v mehkem robotu. Zdaj, ko so pokazali, da lahko ta vrsta umetnih mišic izvaja takšne gibe, kot so prijemanje, zvijanje in upogibanje, upajo, da bodo v prihodnje lahko zasnovali miniaturne, mehke robote z veliko bogatejšim razponom gibanja in možnostmi manipulacije kot kdajkoli prej. Poskuse je vodil podiplomski študent Jiefeng Sun, glavni avtor tega članka.
“Tudi drugi so že razvili to vrsto umetne mišice, vendar je nihče nikoli ni prikazal kot učinkovit način za uporabo v mehkih robotih,” je dejal Zhao, docent na oddelku za strojništvo. “Je tudi zelo majhen – dolg je le nekaj centimetrov.”
Video posnetek s predstavitvijo delovanja si lahko ogledate na: https://bit.ly/31SLhh8
Izdelan iz običajnih niti
Njihov aktuator je izdelan iz običajnih šivalnih niti sukanca, ki ga uporabljamo v gospodinjstvu za šivanje in ga je mogoče oblikovati v številne oblike, ki potem ustvarjajo ustrezno gibanje. Tako kot človeška mišica lahko tudi “čuti” neko silo in se nanjo odzove, na primer na visečo utež.
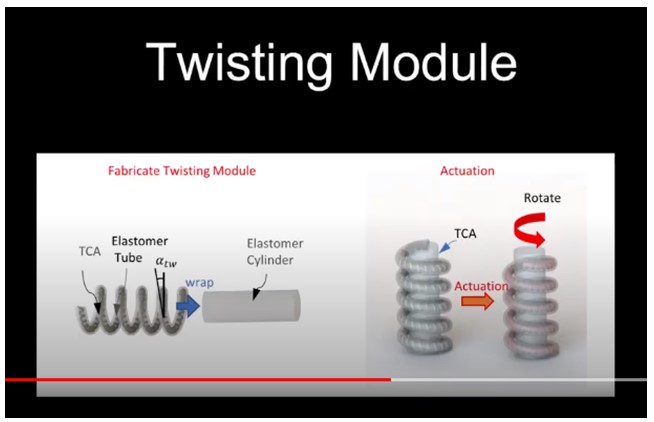
Raziskovalci so izdelali pogon s svojo prepleteno tuljavico tako, da so neprekinjeno sukali nitna vlakna, nato pa ga s pomočjo trna navili v vzmetno obliko. Razvili so tehniko izdelave z enakomernimi vrzelmi med sosednjimi tuljavami, ki dajejo mišicam možnost krčenja, ne da bi jih preobremenili. Takšne “prosto gibajoče” pogone lahko nato vstavimo v mehke robote in dosežemo velike gibalne razsežnosti.
V svojem članku so raziskovalci opisali, kako so vgradili prepletene tuljavice v »U« obliko, vijačno obliko in ravne oblike, s čimer so omogočili tri različne gibe: dvodimenzionalno upogibanje, zvijanje in tridimenzionalno upogibanje. Kombinirali so tudi tri gibe, da so s tem prikazali delovanje popolnoma mehke robotske roke, ki posnema človeško podlaket.
Ta osnovna pomembna spoznanja pri doseganju novih obsegov gibanja pri mehkih robotih bi lahko utirala pot za vse bolj in bolj zapletene robote. Zhao v prihodnosti vidi svet, v katerem bi lahko majhne, nepovezane, mehke robote uporabljali v aplikacijah za iskanje in reševanje ali nadzor. Ali če bi bili res zelo majhni – kot tisti, ki jih je pokazal Sun – bi jih potencialno lahko uporabili v človeškem telesu za dostavo zdravil ali za druge terapije.
Avtorica članka: Anne Manning, Colorado State University
Credit: Colorado State University

{kind=link}