Celera Motion
Resolver je električni transformator, ki se uporablja za merjenje kota vrtenja osi.
Številni resolverji so videti kot električni motor, ki je sestavljen iz bakrenega navitja na statorju in obdelanega kovinskega rotorja.


Kako deluje resolver?
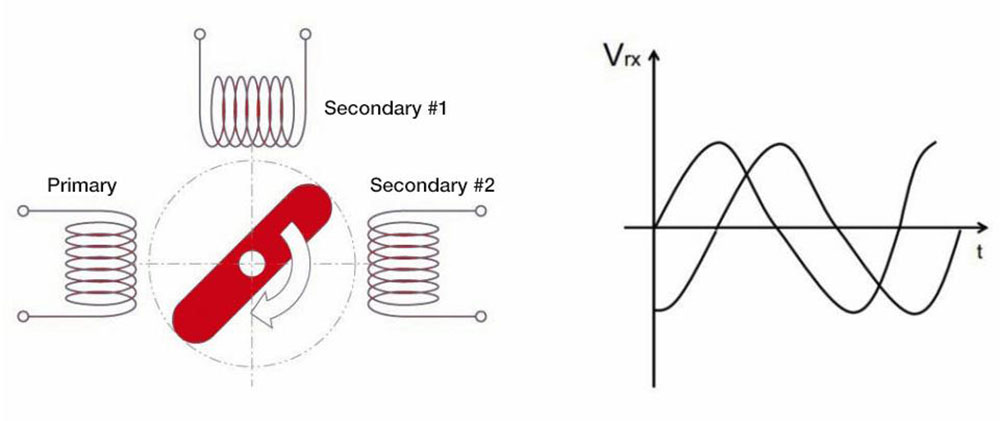
V resolverju se uporabljajo enaka osnovna fizikalna načela kot v električnem transformatorju. V statorju resolverja so običajno bakrena navitja, rotor pa je iz obdelane kovine. Induktivna sprega med navitji se spreminja glede na kotni položaj rotorja. Resolver se napaja z izmeničnim signalom in izhodni tok iz navitij transformatorja je sorazmeren s kotom električnega signala.
Tipični resolver ima tri navitja – primarno navitje in dve sekundarni navitji. Navitja so izdelana iz bakrene žice in so oblikovana na mirujočem elementu resolverja – statorju. Primarna žica deluje kot vhod za izmenični pogonski signal, vsako od sekundarnih navitij pa se uporablja kot sprejemno ali odjemno navitje. Na shemi je rotor izdelan iz materiala, kot sta jeklo ali železo, in je razporejen glede na navitja, zato bo glede na kot vrtenja povezoval različne količine energije s sekundarnimi navitji.
Vrste resolverjev
Obstajajo različne vrste resolverjev:
Brezkrtačni resolver.
Ploščni resolver.
Resolver v obliki palačinke.
Sprejemni resolver.
Diferencialni resolver.
Resolverji slovijo po natančnosti in zanesljivosti ter so pogosto samodejna izbira za aplikacije, povezane z varnostjo. Zaradi uporabe bakrenih navitij in kovinskih elementov so resolverji robustni in težki, robustni in dragi.
V zadnjih letih je postala priljubljena nova generacija naprav – induktivni enkoder. Induktivni enkoderji, kot so IncOders podjetja Celera Motion, uporabljajo enake fizikalne lastnosti kot resolverji, vendar so cenejši, lažji, kompaktnejši in natančnejši. Namesto bakrenega navitja tradicionalnega resolverja induktivni enkoderji kot glavni element uporabljajo tiskana vezja.


Resolverji brez okvirja
Resolver, katerega osna višina je majhna v primerjavi z njegovim premerom, se lahko imenuje resolver brez okvirja, ploščni resolver ali resolver v obliki palačinke. Strogo gledano „brez okvirja“ preprosto pomeni, da je ohišje resolverja odstranjeno, vendar veliko inženirjev uporablja izraz „brez okvirja“, ko govori o resolverju z majhno višino in velikim premerom.
Večina resolverjev je brezkrtačnih in ne krtačnih, vendar vsi temeljijo na principih transformatorja. Z drugimi besedami, gre za induktivne senzorje kota. Ko se položaj rotorja resolverja spreminja glede na stator, se spreminja elektromagnetni sklop med rotorjem in statorjem. To se kaže kot sinusno spreminjanje izhodnih signalov resolverja glede na pobudni ali vhodni signal.
Nekateri resolverji se imenujejo „enostopenjski“, „dvostopenjski“, „štiristopenjski“ itd. To se nanaša na to, kolikokrat se izhodna vrednost resolverja edinstveno spremeni med enim obratom. Izhodna vrednost enostopenjskega resolverja je edinstvena za 1 obrat; izhodna vrednost dvostopenjskega resolverja je edinstvena za 180 stopinj znotraj 1 obrata; izhodna vrednost štiristopenjskega resolverja je edinstvena za 90 stopinj znotraj 1 obrata in tako naprej.
Resolverji imajo odlične rezultate pri aplikacijah, povezanih z varnostjo, zlasti v civilnem letalstvu in vesolju. So izredno robustni in zanesljivi, vendar so običajno okorni, težki in jih je težko prilagoditi.
Obročni resolverji
Obročni enkoderji so znani tudi kot enkoderji z veliko votlo odprtino ali enkoderji z veliko prehodno gredjo. Tako kot pri brezokvirnih resolverjih se vsi ti izrazi nanašajo na enkoder, katerega osna višina je majhna v primerjavi z njegovim premerom. Obročni enkoderji so običajno optični ali magnetni.
Optični enkoder uporablja skeniranje fine rešetke ali „lestvice“, ki jo osvetljuje vir LED svetlobe. Vrtljiva ali linearna lestvica je sestavljena iz prozornih in neprozornih „črt“, ki so razporejene v delovnem ciklu 50-50. Število prozornih območij na ploščici ustreza razmiku lestvice, ki določa ločljivost enkoderja. Senzor ustvarja napetost sorazmerno z jakostjo vpadne svetlobe. Ko se senzor premika glede na lestvico, se napetost sinusno spreminja. Optični enkoderji zagotavljajo visoko stopnjo natančnosti, vendar so razmeroma krhki in dovzetni za nečistoče.
Magnetni enkoder uporablja večpolno magnetno sled. Senzor s Hallovim učinkom ali magnetoresistivni senzor meri spremembo magnetnega pretoka pri premikanju magnetnih polov glede na senzor. Sinusni in kosinusni signali se lahko ustvarijo kot pri optičnem enkoderju. Magnetni enkoderji so robustni, kompaktni in so lahko zelo cenovno ugodni. Vendar so občutljivi na magnetna polja. Težko je izdelati magnetno sled z majhnim korakom, ki omejuje ločljivost. Ponovljivost je ogrožena zaradi histereze in natančnosti, ki se spreminja v območju delovne temperature. Magnetna sled je razmeroma krhka in je lahko občutljiva na udarce.
Induktivni enkoderji
Induktivni enkoderji (IncOders) uporabljajo enako osnovno fiziko kot resolverji, vendar ponujajo enake digitalne električne izhode kot optični enkoderji. To pomeni, da zagotavljajo enako robustnost in zanesljivost kot resolverji, vendar z enostavnim električnim vmesnikom za uporabo.
V nasprotju z resolverjem se vsa elektronika, potrebna za delovanje, nahaja v statorju IncOderja. To pomeni, da je električni vmesnik običajno potrebuje nizkonapetostno enosmerno napajanje, ki proizvaja digitalni podatkovni izhod, ki predstavlja absolutni kot ali spremembo kota.
Za razliko od obročnega enkoderja IncOder ne meri le na eni točki, temveč po celotni ploskvi rotorja in statorja. To pomeni, da so IncOderji veliko manj dovzetni za netočnosti zaradi nekoncentričnega vrtenja, zato je njihova namestitev razmeroma enostavna.
IncOderji so še posebej primerni za aplikacije, kot so kardanske gredi in vrtljive mize, kjer se zahteva majhna osna višina in velika prečna odprtina.
IncOders so na voljo v absolutni in inkrementalni obliki z digitalnimi izhodi visoke ločljivosti (do 4 milijone števcev na obhod), kot so impulzi SSI, SPI, BiSS-C in AquadB. Nekatere naprave so na voljo tudi kot nadomestki za potenciometre z izhodi 0-5V in 0-10V.

{kind=link}