INOTEH d. o. o.
V številnih aplikacijah robotike, kot sta doziranje ali varjenje, se orodje zaradi obrabe ali deformacij nenehno spreminja.
Ker ti postopki pogosto zahtevajo najvišjo možno natančnost, je nujno redno preverjanje in kalibriranje središčne točke orodja (angl. Tool Center Point – TCP). To je treba izvesti po menjavi orodja, vsakem vzdrževanju, na začetku delovne izmene ali celo po vsakem procesnem ciklu.

Re-kalibracija mora potekati samodejno. S tem zmanjšamo zastoje, količino izmeta in dodelav ter povečamo kakovost končnih izdelkov.
Laserska kalibracija TCP
CAPTRON-ova tehnologija merjenja TCP za industrijske robote zagotavlja maksimalno natančnost pri kalibraciji orodja s ponovljivostjo 0,01 mm in zanesljivo zaznava tako kovinske kot nekovinske predmete.
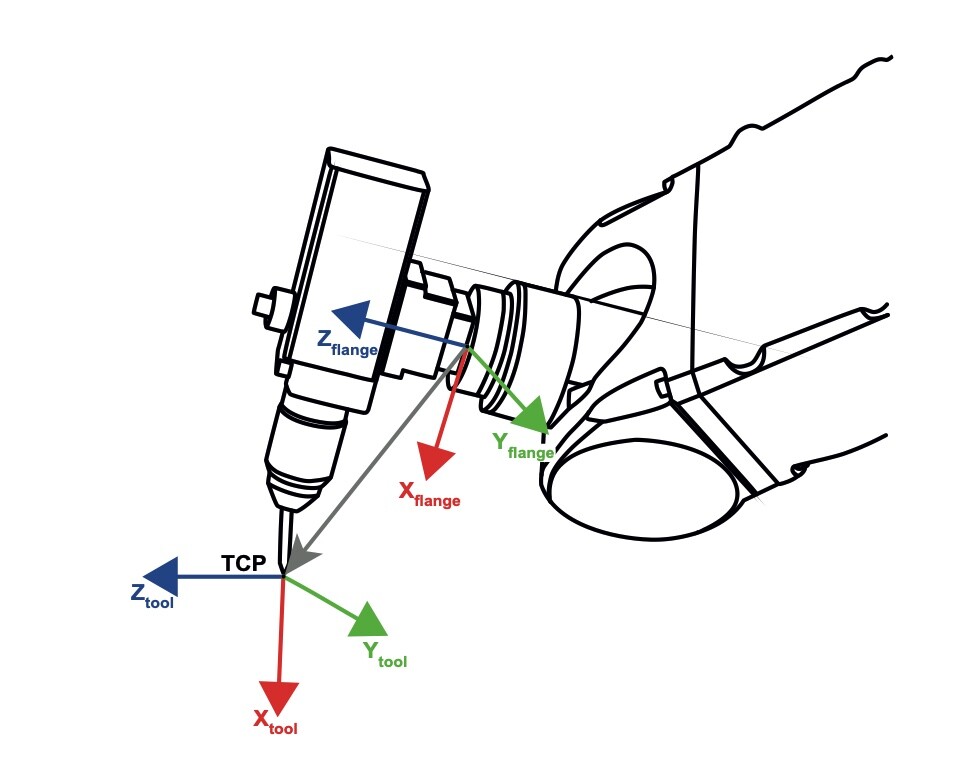
TCP je definiran glede na prirobnico robota (glej sliko 2). Koordinate orodja se lahko vnesejo neposredno numerično ali pa se izmerijo s kalibracijsko metodo. Pri programiranju aplikacije se uporablja koordinatni sistem orodja. Če se orodje spremeni, se TCP preprosto prilagodi, ta sprememba pa se nato upošteva v vseh robotskih programih gibanja, kjer se to orodje uporablja.
Uporaba sistema TCP
Merilni instrumenti delujejo z dvema pravokotno poravnanima laserskima svetlobnima pregradama, s katerimi določajo odstopanja robotskega orodja. Preklopni signali merilne naprave se uporabijo za samodejno korekcijo TCP in s tem za avtomatsko popravljanje gibanja robota.
Ker ima orodje premer, večji od nič, se laserski žarek med prehodom orodja prekine. »Sredina« prekinitve svetlobe, ki izhaja iz padajočega in naraščajočega roba svetlobnega signala merilnika TCP, predstavlja želeno referenčno točko orodja x-ref in y-ref.
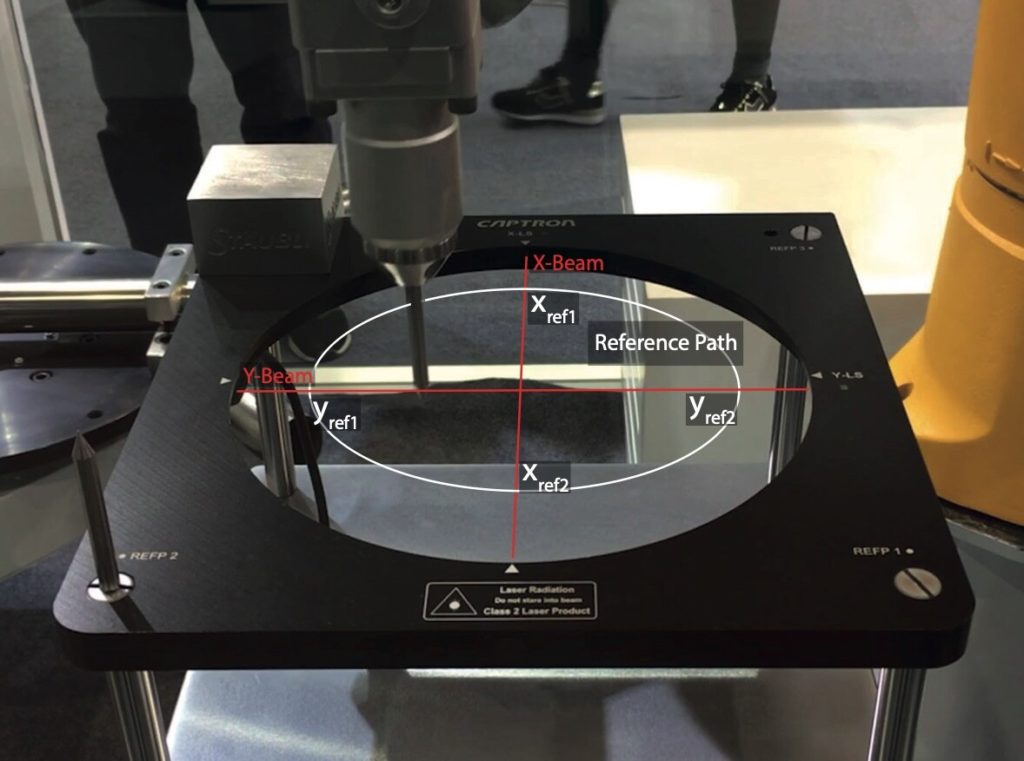
Nato se programirajo sekvence gibanja robotske aplikacije in izvede delovni proces. Za ponovno kalibracijo se orodje ponovno premakne po krožni poti skozi laserska žarka merilnika TCP. Naprava zazna odstopanje od referenčnih položajev, orodje pa se ustrezno korigira v smereh osi x in y.
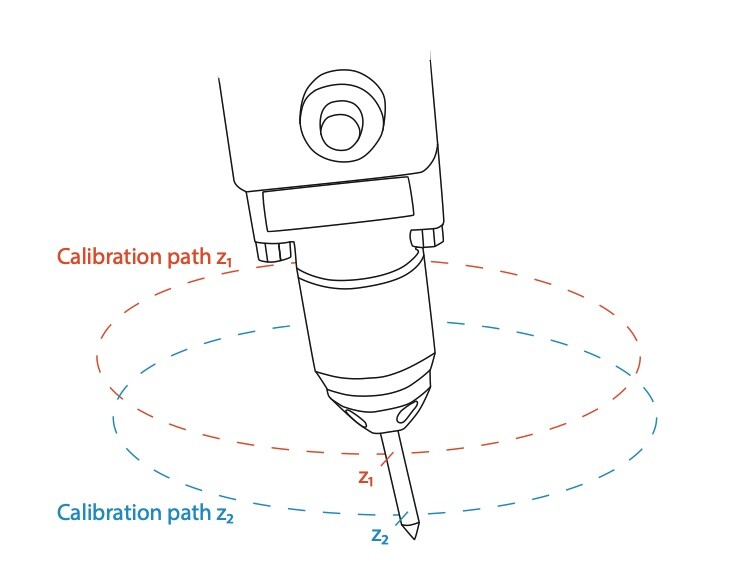
Za korekcijo nagnjenega orodja, npr. upognjene varilne konice, se kalibracijski pomiki robota izvedejo z dvema krožnima giboma na različnih višinah z1 in z2 (glej sliko 4). Vsaka prekinitev laserskih žarkov v osi x in y določi korekcijske položaje x-cal1, x-cal2 ter y-cal1, y-cal2. Iz odstopanj TCP med obema re-kalibracijskima potema je nato mogoče izračunati in korigirati kot nagiba α.
O proizvajalcu CAPTRON
Več kot 30 let izkušenj uvršča podjetje CAPTRON med najbolj priznane proizvajalce in inovatorje na področju kapacitivnega merjenja nivoja. CAPTRON izdeluje vse sonde po posameznem naročilu in specifičnih zahtevah strank, pri čemer zagotavlja vrhunsko kakovost.
Za več informacij o izdelkih se obrnite na podjetje INOTEH D.O.O.
INOTEH d. o. o.
K železnici 7
SI-2345 Bistrica ob Dravi
info@inoteh.si
+386(0)2 673 01 34
https://www.inoteh.si

{kind=link}