Massachusetts Institute of Technology
Raziskovalci so razvili algoritem, ki robotu omogoča, da „razmišlja vnaprej“ in hkrati upošteva tisoče možnih načrtov gibanja.
Ste pripravljeni na dolgo pričakovane poletne počitnice? Najprej morate v kovček zložiti vse potrebno za potovanje in poskrbeti, da je vse varno spravljeno, da se ne bi se kaj krhkega poškodovalo.
Ker imajo ljudje močne vizualne in geometrijske sposobnosti razmišljanja, je to običajno preprost problem, čeprav je morda potrebno nekaj spretnosti, da vse stisnete v kovček.
Za robota pa je to izredno zapleten načrtovalski izziv, ki zahteva sočasno razmišljanje o številnih dejanjih, omejitvah in mehanskih zmogljivostih. Iskanje učinkovite rešitve bi lahko robotu vzelo zelo veliko časa – če sploh lahko najde kakšno rešitev.
Raziskovalci iz MIT in NVIDIA Research so razvili nov algoritem, ki bistveno pospeši proces robotovega planiranja. Njihov pristop omogoča robotu, da „razmišlja vnaprej“, saj hkrati ovrednoti tisoče možnih rešitev in nato izbere najboljše, ki ustrezajo omejitvam robota in njegovega okolja.
Namesto da bi preizkušali vsako potencialno dejanje posebej, kot pri mnogih obstoječih pristopih, ta nova metoda upošteva tisoče dejanj hkrati in v nekaj sekundah reši večstopenjske manipulacijske probleme.
Raziskovalci izkoriščajo ogromno računsko moč specializiranih procesorjev, imenovanih grafične procesne enote (GPU), da omogočijo to pospešitev.
V tovarni ali skladišču bi njihova tehnika robotom omogočila, da hitro ugotovijo, kako ravnati z izdelki različnih oblik in velikosti ter jih tesno zapakirati, ne da bi jih poškodovali, prevrnili ali trčili v ovire, tudi v ozkih prostorih.
„To bi bilo zelo koristno v industrijskih okoljih, kjer je čas resnično pomemben in je treba čim prej najti učinkovito rešitev. Če vaš algoritem za iskanje načrta potrebuje minute namesto sekund, to podjetje stane denar,“ pravi William Shen SM ’23, diplomant MIT-ja in glavni avtor članka o tej tehniki.
Pri pripravi članka so sodelovali še Caelan Garrett ’15, MEng ’15, PhD ’21, višji raziskovalni znanstvenik pri NVIDIA Research; Nishanth Kumar, podiplomski študent MIT; Ankit Goyal, raziskovalni znanstvenik pri NVIDIA; Tucker Hermans, raziskovalni znanstvenik pri NVIDIA in izredni profesor na Univerzi v Utahu; Leslie Pack Kaelbling, profesorica računalništva in inženirstva na MIT in članica Laboratorija za računalništvo in umetno inteligenco (CSAIL); Tomás Lozano-Pérez, profesor računalništva in inženirstva na MIT in član CSAIL; ter Fabio Ramos, glavni raziskovalni znanstvenik pri NVIDIA in profesor na Univerzi v Sydneyju. Raziskava bo predstavljena na konferenci Robotics: Science and Systems Conference.
Planiranje in paralelnost
Algoritem raziskovalcev je zasnovan za tako imenovano načrtovanje nalog in gibov (TAMP). Cilj algoritma TAMP je oblikovati načrt nalog za robota, ki je zaporedje dejanj na visoki ravni, skupaj z načrtom gibov, ki vključuje parametre dejanj na nizki ravni, kot so položaji sklepov in usmeritev prijemala, ki dopolnjujejo načrt na visoki ravni.
Da bi robot lahko ustvaril načrt za pakiranje predmetov v škatlo, mora upoštevati številne spremenljivke, kot so končna usmeritev pakiranih predmetov, da se ti med seboj prilegajo, ter način, kako jih bo pobral in manipuliral z roko in prijemalom.
To mora storiti ob upoštevanju načina, kako se izogniti trkom in izpolniti vse omejitve, ki jih določi uporabnik, na primer določen vrstni red pakiranja predmetov.
Glede na toliko možnih zaporedij dejanj bi naključno vzorčenje možnih rešitev in poskušanje ene po eni lahko trajalo izredno dolgo.
„Gre za zelo velik prostor iskanja, in veliko dejanj, ki jih robot opravi v tem prostoru, v resnici ne prinesejo nič produktivnega,“ dodaja Garrett.
Namesto tega raziskovalčev algoritem, imenovan cuTAMP, ki je pospešen z uporabo vzporedne računalniške platforme CUDA, vzporedno simulira in izpopolnjuje tisoče rešitev. To stori s kombinacijo dveh tehnik, vzorčenja in optimizacije.
Vzorčenje vključuje izbiro rešitve, ki jo želimo preizkusiti. Vendar cuTAMP ne vzorči rešitev naključno, temveč omeji obseg potencialnih rešitev na tiste, ki najverjetneje izpolnjujejo omejitve problema. Ta spremenjen postopek vzorčenja omogoča cuTAMP-u, da široko raziskuje potencialne rešitve, hkrati pa zoži prostor vzorčenja.
„Ko združimo rezultate teh vzorcev, dobimo veliko boljšo izhodiščno točko, kot če bi vzorčili naključno. To nam omogoča, da med optimizacijo hitreje najdemo rešitve,“ pravi Shen.
Ko cuTAMP ustvari niz vzorcev, izvede vzporedni optimizacijski postopek, ki izračuna strošek, ki ustreza temu, kako dobro vsak vzorec preprečuje trke in izpolnjuje omejitve gibanja robota, pa tudi vse cilje, ki jih določi uporabnik.
Vzorce posodablja vzporedno, izbere najboljše kandidate in ponavlja postopek, dokler jih ne zoži na uspešno rešitev.
Izkoriščanje pospešenega računalništva
Raziskovalci izkoriščajo GPU-je, specializirane procesorje, ki so veliko močnejši za vzporedno računanje in delovne obremenitve kot splošni CPU-ji. S tem so maksimirali zmogljivost svojega algoritma.
„Z uporabo grafičnih procesorjev so stroški računalniške optimizacije ene rešitve enaki stroškom optimizacije več sto ali tisoč rešitev,“ pojasnjuje Shen.
Ko so svoj pristop preizkusili na simulaciji izzivov pakiranja, podobnih igri Tetris, je cuTAMP v le nekaj sekundah našel uspešne načrte brez trkov, za katere bi zaporedni pristopi načrtovanja potrebovali veliko več časa.
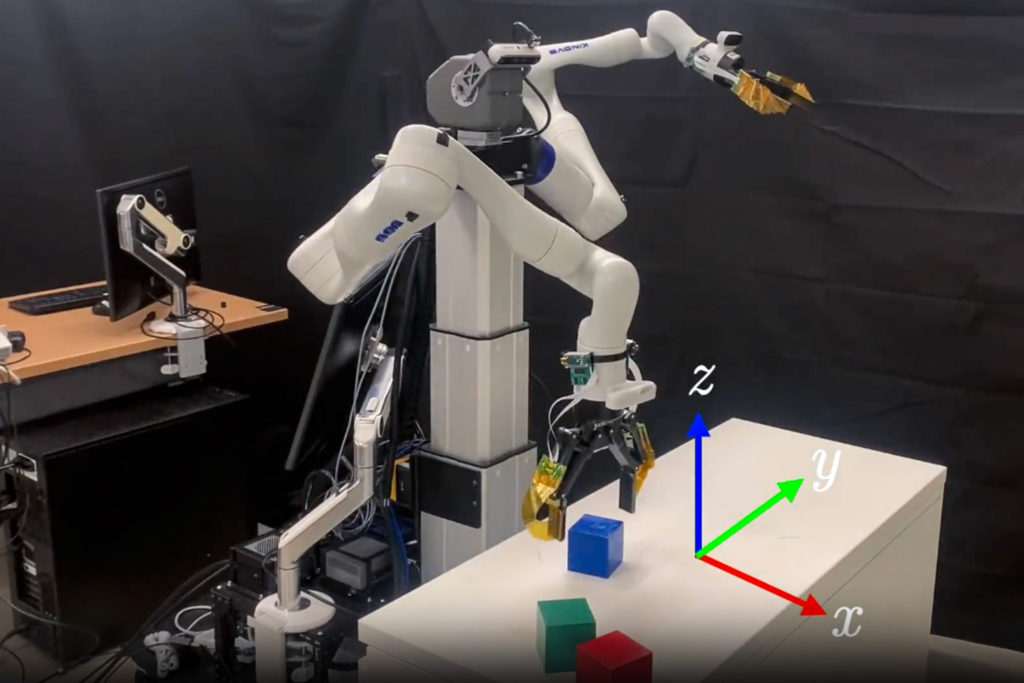
Ko je bil algoritem uporabljen na pravi robotski roki, je vedno našel rešitev v manj kot 30 sekundah.
Sistem deluje na različnih robotih in je bil preizkušen na robotski roki na MIT in humanoidnem robotu v podjetju NVIDIA. Ker cuTAMP ni algoritem za strojno učenje, ne potrebuje podatkov za usposabljanje, kar omogoča njegovo takojšnjo uporabo v številnih situacijah.
„Lahko mu zastavite povsem novo težavo in jo bo zagotovo rešil,“ pravi Garrett.
Algoritem je mogoče uporabiti tudi v drugih situacijah, ne le pri pakiranju. Na primer pri robotih, ki uporabljajo orodja. Uporabnik lahko v sistem vključi različne vrste spretnosti, da samodejno razširi zmogljivosti robota. V prihodnosti želijo raziskovalci v cuTAMP izkoristiti velike jezikovne modele in vizualne jezikovne modele, ki bodo robotu omogočili oblikovanje in izvedbo načrta za doseganje določenih ciljev na podlagi glasovnih ukazov uporabnika.
To delo delno podpirajo Nacionalna znanstvena fundacija (NSF), Urad za znanstvene raziskave vojaškega letalstva, Urad za pomorske raziskave, MIT Quest for Intelligence, NVIDIA in Inštitut za robotiko in umetno inteligenco.
Povzeto po:
https://news.mit.edu/2025/new-system-enables-robots-to-solve-manipulation-problems-seconds-0605
Slika vir: MIT news
https://news.mit.edu/

{kind=link}