![]()
Princeton uniersity
V stanovanju Jimmyja Wuja se skupina mini robotov kaotično premika, zavija in zig-zag-a po mizi. Videti je kot agresiven avtomobilski rally, a v nekaj minutah se pojavi red.
Roj se združi, ko roboti tekmujejo v formaciji, da bi pobrali koščke smeti in jih odložili na označevalnik golov. Pri tem je neverjetno to, da se roboti učijo sami. “Robotom poskušamo povedati: ‘Poglejte, vsakič, ko boste kos smeti uspešno odvrgli v koš za smeti, boste prejeli nagrado,’ in to je vse, kar vedo,” je povedal Szymon Rusinkiewicz, David M. Siegel ’83 Profesor računalništva. “Imamo algoritme, pri katerih, se sčasoma naučijo, kaj je tisto, zaradi česar dobijo nagrade.” Wu je podiplomski študent v Rusinkiewiczevi raziskovalni skupini, ki si prizadeva uporabiti tehniko, imenovano učenje s krepitvijo, v robotiki. Metoda, ki jo trenerji psov poznajo povsod, ponuja nagrade za dobro delovanje. V primeru robotov so nagrade matematične, kot točke v video igrici. Osnovni algoritmi, ki usmerjajo vedenje robotov, so prilagodljivi in se spreminjajo z nagradami, tako da lahko roboti razvijejo lastne metode za reševanje problemov, ki temeljijo na milijonih računalniških simulacij.
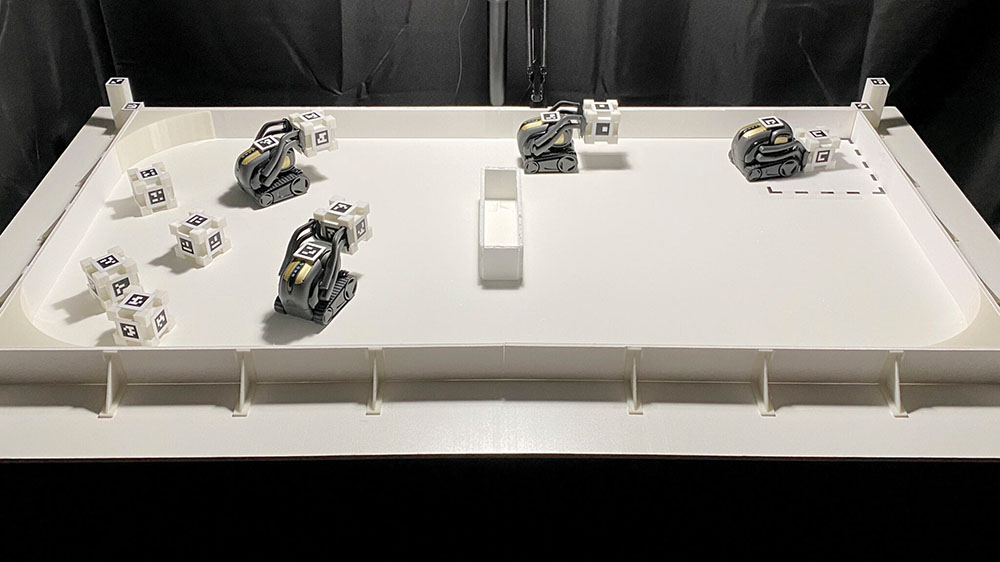
Rusinkiewicz je dejal, da bo dolgoročni cilj vključeval sodelovanje številnih različnih laboratorijev Princetona, ki delajo na projektih, kot so senzorski nizi, varnostni protokoli in skupinska dinamika. “Delo se zelo lepo ujema z raziskavami, ki jih izvajajo drugi ljudje v robotiki,” je dejal. V nedavnem projektu so raziskovalci robotom velikosti igračke dodelili nalogo, da poberejo majhne plastične bloke z oznako smeti in jih premaknejo v cilj. Na začetku so bili vsi roboti opremljeni z drobnimi buldožerji, a ko je eksperiment napredoval, so roboti uporabljali različne tehnike. Rusinkiewicz je dejal, da so se roboti naučili sodelovati na presenetljive načine. “Agent za metanje meče stvari v splošni smeri cilja, drugi agent pa se druži blizu gola, ga pobere in spusti noter,” je dejal. »Navdušujoče je, da tem agentom dajemo enako nastavitev, enako nagrado, vendar se naučijo izkoriščati svoje moči in se naučijo sodelovati. Zelo nas zanima, kako daleč lahko to idejo razvijemo. Ali lahko dobimo agente, ki se naučijo sodelovati, imeti še bolj specializirane ideje, ne da bi jim povedali, kaj naj naredijo?«
Povzeto po:
https://engineering.princeton.edu/news/2022/01/25/picking-trash-robots-pick-new-approaches-work

{kind=link}