![]()
Raziskovalci na Visoki šoli za kmetijske znanosti v Penn State-u so razvili robotski mehanizem za nabiranje in obrezovanje gob in dokazali njegovo učinkovitost pri avtomatiziranem nabiranju gob.
V novi študiji je prototip, ki je zasnovan tako, da je integriran s sistemom strojnega vida, pokazal, da je sposoben nabirati in obrezovati gobe, ki rastejo v regalnem sistemu.
Po besedah vodilnega avtorja Long Heja, docenta za kmetijsko in biološko inženirstvo, je raziskava posledična, ker se gobarska industrija sooča s pomanjkanjem delovne sile in naraščajočimi stroški dela. Mehansko ali robotsko nabiranje lahko pomaga ublažiti te težave.
 “Gobarska industrija v Pensilvaniji pridela približno dve tretjini gob, pridelanih po vsej državi, in tu pridelovalci težko najdejo delavce, ki bi opravili s pobiranjem, kar je zelo delovno intenzivno in težko delo,” je dejal. “Industrija se sooča z nekaterimi izzivi, zato bi bil avtomatiziran sistem za spravilo pridelkov, kot ga delamo, v veliko pomoč.”
“Gobarska industrija v Pensilvaniji pridela približno dve tretjini gob, pridelanih po vsej državi, in tu pridelovalci težko najdejo delavce, ki bi opravili s pobiranjem, kar je zelo delovno intenzivno in težko delo,” je dejal. “Industrija se sooča z nekaterimi izzivi, zato bi bil avtomatiziran sistem za spravilo pridelkov, kot ga delamo, v veliko pomoč.”
Goba Agaricus bisporus – je pomembno kmetijsko blago. Po podatkih ameriškega ministrstva za kmetijstvo je bilo v ZDA od leta 2017 do 2018 porabljenih 891 milijonov funtov gob v vrednosti 1,13 milijarde ameriških dolarjev. Od te proizvodnje je bilo 91% namenjenih za sveži trg, po navedbah ameriškega ministrstva za kmetijstvo in so jih nabrali ročno zato, da se zagotovi kakovost izdelka, rok uporabnosti in videz. Poudaril je, da stroški dela za nabiranje gob znašajo od 15 do 30% vrednosti proizvodnje.
Razvoj naprave za učinkovito obiranje gob je bil zapleten poskus, je pojasnil He. Pri ročnem nabiranju pobiralec najprej locira zrelo gobo in jo odstrani z eno roko, običajno s tremi prsti. Nato z drugo roko nabiralec odstrani konec beta. Včasih nabiralec počaka, da so v roki dve ali tri gobe, in jih reže bete enega za drugim. Na koncu gobo damo v zbiralno škatlo. Robotski mehanizem je moral doseči enakovreden postopek nabiranja.
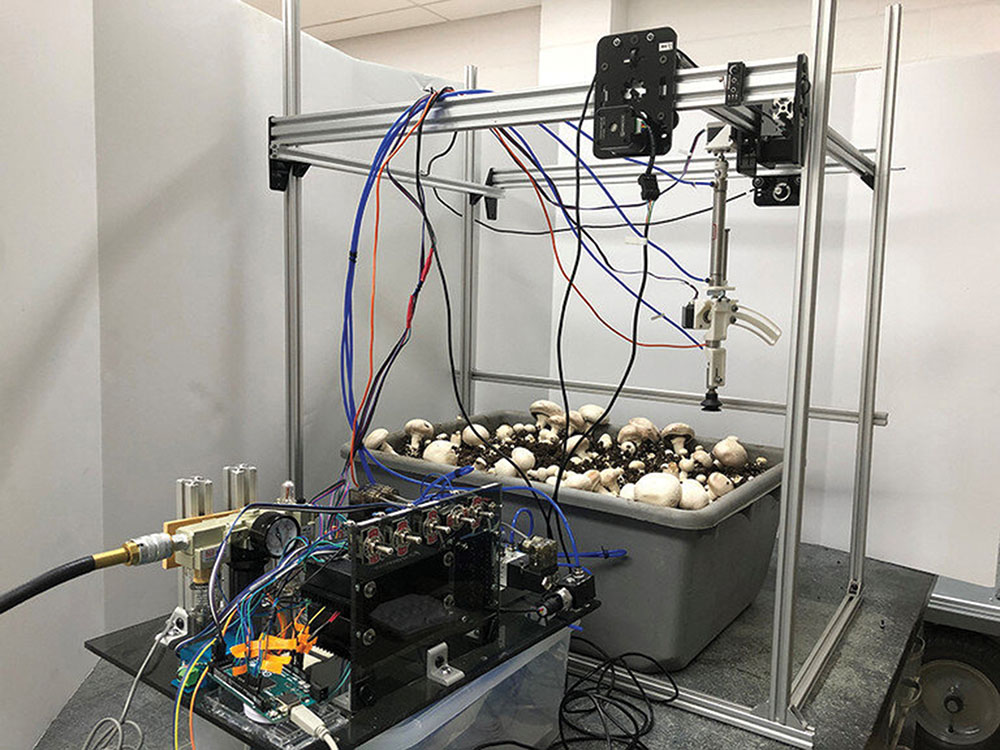 Raziskovalci so zasnovali robotski mehanizem za nabiranje gob, ki je vključeval nabiralno prijemalo, ki temelji na upogibnem gibanju, končno prijemalo za določanje položaja s 4 stopnjami svobode za premikanje končnega prijemala gobe, končno prijemalo za obrezovanje in elektro-pnevmatski nadzorni sistem. Izdelali so laboratorijski prototip, da bi potrdili delovanje mehanizma.
Raziskovalci so zasnovali robotski mehanizem za nabiranje gob, ki je vključeval nabiralno prijemalo, ki temelji na upogibnem gibanju, končno prijemalo za določanje položaja s 4 stopnjami svobode za premikanje končnega prijemala gobe, končno prijemalo za obrezovanje in elektro-pnevmatski nadzorni sistem. Izdelali so laboratorijski prototip, da bi potrdili delovanje mehanizma.
Raziskovalna skupina je uporabila mehanizem priseska za zapiranje gob in izvedla teste modric na klobukih gob, da bi analizirala vpliv zračnega tlaka in časa delovanja priseska.
Rezultati preskusov, nedavno objavljeni v Transactions of the American Society of Agricultural and Biological Engineers, so pokazali, da je bilo končno prijemalo uspešno postavljeno na ciljne lokacije in je bila njegova uspešnost ob prvem izbiranju 90%, po drugem pa 94,2%. .
Končno prijemalo za obrezovanje je v celoti doseglo 97-odstotno uspešnost. Preizkusi modric so pokazali, da je zračni tlak glavni dejavnik, ki vpliva na raven modrice, v primerjavi s časom delovanja priseska, optimiziran sesalnik pa lahko pomaga pri lajšanju poškodb zaradi modrice, so opozorili raziskovalci. Rezultati laboratorijskih testov so pokazali, da se razviti mehanizem obiranja lahko uporabi pri samodejnem obiranju gob.
Gobe za študijo so gojili v Penn State’s Mushroom Research Center v University Park kampusu. Izdelava in poskusi so bili izvedeni v Centru za raziskovanje in razširjanje sadja v Biglervillu. Za ovrednotenje robotskega mehanizma pobiranja je bilo opravljenih 70 preizkusov nabiranja. Delovni tlak pnevmatskega sistema in sesalnika je bil določen na 5,4 in 1,7 mBar (80 in 25 funtov na kvadratni palec).
Povzeto po:
https://techxplore.com/news/2021-06-prototype-robotic-device-trim-button.html

{kind=link}