Massachusetts Institute of Technology
Poleg usposabljanja bodočih igralcev bi ta tehnologija lahko razširila zmogljivosti drugih humanoidnih robotov, na primer za delo v industriji, pa tudi za iskanje in reševanje.
MIT inženirji se vključujejo v robotsko igro namiznega tenisa z močnim, lahkim dizajnom, ki vrača udarce z visoko hitrostjo in natančnostjo.
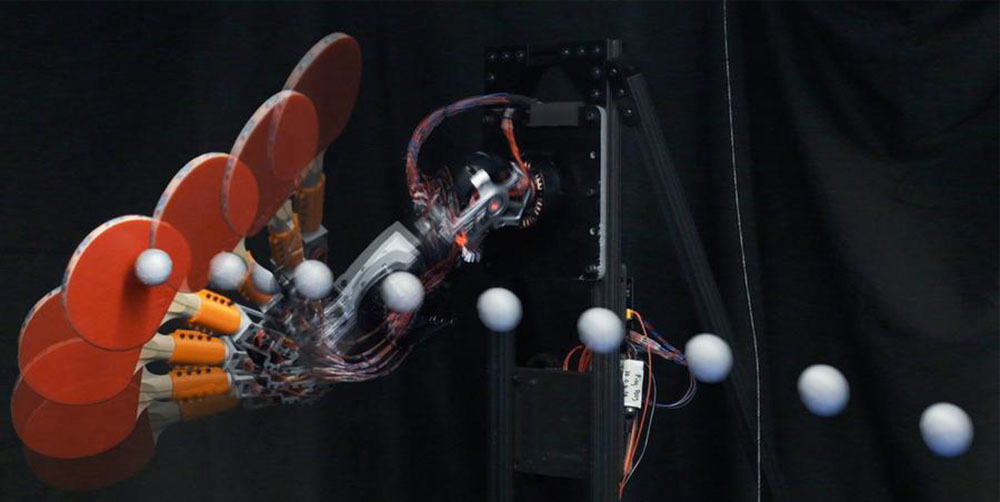
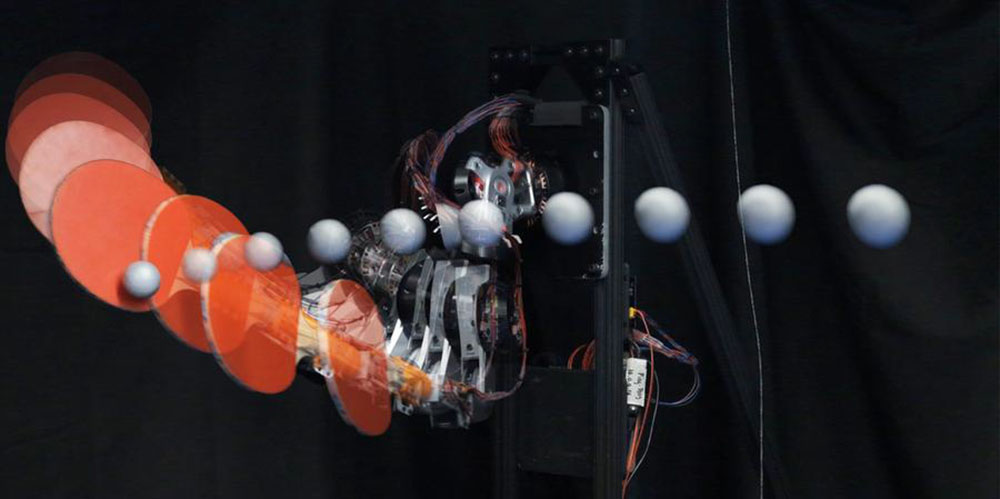
Novi robot za namizni tenis je sestavljen iz robotske roke iz več členov. Roka je pritrjena na en konec mize za namizni tenis in drži standardni lopar za namizni tenis. S pomočjo več hitrih kamer in prediktivnega krmilnega sistema z visoko pasovno širino robot hitro oceni hitrost in pot prihajajoče žogice ter izvede enega od več vrst udarcev – topspin, udarcembrez rotacije ali backspin –, da žogico natančno udari na želeno mesto na mizi z različnimi vrstami rotacije.
V testih so inženirji na robota vrgli 150 žogic, eno za drugo, z druge strani mize za namizni tenis. Robot je uspešno vrnil žogice z uspešnostjo približno 88 odstotkov pri vseh treh vrstah zamahov. Hitrost udarca robota se približuje najvišjim hitrostim vrnitve človeških igralcev in je hitrejša od drugih robotskih modelov za namizni tenis.
Sedaj želi ekipa povečati igralni radij robota, da bo lahko vračal več različnih udarcev. Nato si predstavljajo, da bi ta nastavitev lahko postala konkurenčna v rastočem področju pametnih robotskih sistemov za trening.
Ekipa pravi, da bi se tehnologija namiznega tenisa lahko prilagodila tudi za izboljšanje hitrosti in odzivnosti humanoidnih robotov, zlasti v scenarijih iskanja in reševanja ter v situacijah, v katerih bi robot moral hitro reagirati ali predvideti.
„Problemi, ki jih rešujemo, zlasti v zvezi z zelo hitrim in natančnim prestrezanjem predmetov, bi lahko bili koristni v scenarijih, v katerih mora robot izvajati dinamične manevre in v realnem času načrtovati, kje bo njegov končni položaj srečal predmet,“ pravi David Nguyen, podiplomski študent MIT.
Nguyen je soavtor nove študije, skupaj z diplomantom MIT Kendrickom Canciom in Sangbae Kimom, izrednim profesorjem strojništva in vodjo laboratorija za biomimetično robotiko na MIT. Raziskovalci so rezultate teh poskusov predstavili v članku na mednarodni konferenci IEEE o robotiki in avtomatizaciji (ICRA).
Natančno igranje
Izdelava robotov za igranje namiznega tenisa je izziv, s katerim se raziskovalci ukvarjajo že od 80. let prejšnjega stoletja. Problem zahteva edinstveno kombinacijo tehnologij, vključno z zelo hitrim računalniškim vidom, hitrimi in okretnimi motorji in aktuatorji, natančnim krmiljenjem manipulatorja in natančnim napovedovanjem v realnem času, pa tudi načrtovanjem igralne strategije na višji ravni.
„Če pomislite na spekter problemov nadzora v robotiki, imamo na eni strani manipulacijo, ki je običajno počasna in zelo natančna, kot je dvigovanje predmeta in preverjanje, ali ga dobro držite. Na drugi strani imate gibanje, ki je dinamično in se prilagaja motnjam v sistemu,“ pojasnjuje Nguyen. „Namizni tenis je nekje vmes. Še vedno opravljate manipulacijo, saj morate biti natančni pri udarjanju žogice, vendar jo morate udariti v 300 milisekundah. Tako uravnavate podobne probleme dinamičnega gibanja in natančne manipulacije.“
Roboti za namizni tenis so od 80. let prejšnjega stoletja prehodili dolgo pot, nazadnje z zasnovami podjetij Omron in Google DeepMind, ki uporabljajo tehnike umetne inteligence za „učenje“ iz prejšnjih podatkov o namiznem tenisu, da bi izboljšali zmogljivost robota pri vse večji raznolikosti udarcev. Te zasnove so se izkazale za dovolj hitre in natančne, da se lahko pomerijo s človeškimi igralci namiznega tenisa srednje ravni.
„To so resnično specializirani roboti, zasnovani za igranje namiznega tenisa,“ pravi Cancio. „Z našim robotom raziskujemo, kako bi se tehnike, ki se uporabljajo pri igranju namiznega tenisa, lahko prenesle v bolj splošen sistem, kot je humanoidni ali antropomorfni robot, ki lahko opravlja veliko različnih in koristnih stvari.“
Nadzor igre
Za svoj novi dizajn so raziskovalci modificirali lahko in zelo zmogljivo robotsko roko, ki jo je Kimov laboratorij razvil kot del MIT Humanoid – dvonožnega, dvoročnega robota, ki je velik približno kot majhen otrok. Skupina uporablja robota za testiranje različnih dinamičnih manevrov, vključno z vožnjo po neravnem in spremenljivem terenu, skakanjem, tekom in izvajanjem salto nazaj, s ciljem, da bi nekoč takšne robote uporabili za iskalne in reševalne operacije.
Vsaka humanoidna roka ima štiri sklepe ali stopnje svobode, ki jih nadzira električni motor. Cancio, Nguyen in Kim so izdelali podobno robotsko roko, ki so jo prilagodili za igranje namiznega tenisa tako, da so dodali dodatno stopnjo svobode v zapestju, da bi omogočili nadzor nad loparjem.
Ekipa je robotsko roko pritrdila na mizo na enem koncu standardne mize za namizni tenis in okoli mize namestila hitre kamere za zajemanje gibanja, da bi sledile žogicam, ki so odskakovale od robota. Razvili so tudi optimalne krmilne algoritme, ki na podlagi matematičnih in fizikalnih načel napovedujejo, s kakšno hitrostjo in v kakšnem položaju naj roka izvede udarec, da bi žogico udarila z določenim zamahom: z rotacijo (ali topspinom), z udarcem (brez rotacije) ali z rezanjem (backspinom).
Algoritme so izvedli s pomočjo treh računalnikov, ki so hkrati obdelovali slike kamere, ocenjevali stanje žoge v realnem času in te ocene pretvarjali v ukaze za motorje robota, da se je ta lahko hitro odzval in izvedel zamah.
Po zaporednem odbijanju 150 žogic z roko so ugotovili, da je bila stopnja zadetkov robota, ali natančnost vračanja žogice, približno enaka za vse tri vrste zamahov: 88,4 odstotka za topspin udarce, 89,2 odstotka za zamahe brez rotacije in 87,5 odstotka za backspin zamahe. Od takrat so izboljšali reakcijski čas robota in ugotovili, da roka udari žogice hitreje kot obstoječi sistemi, in sicer s hitrostjo 20 metrov na sekundo.
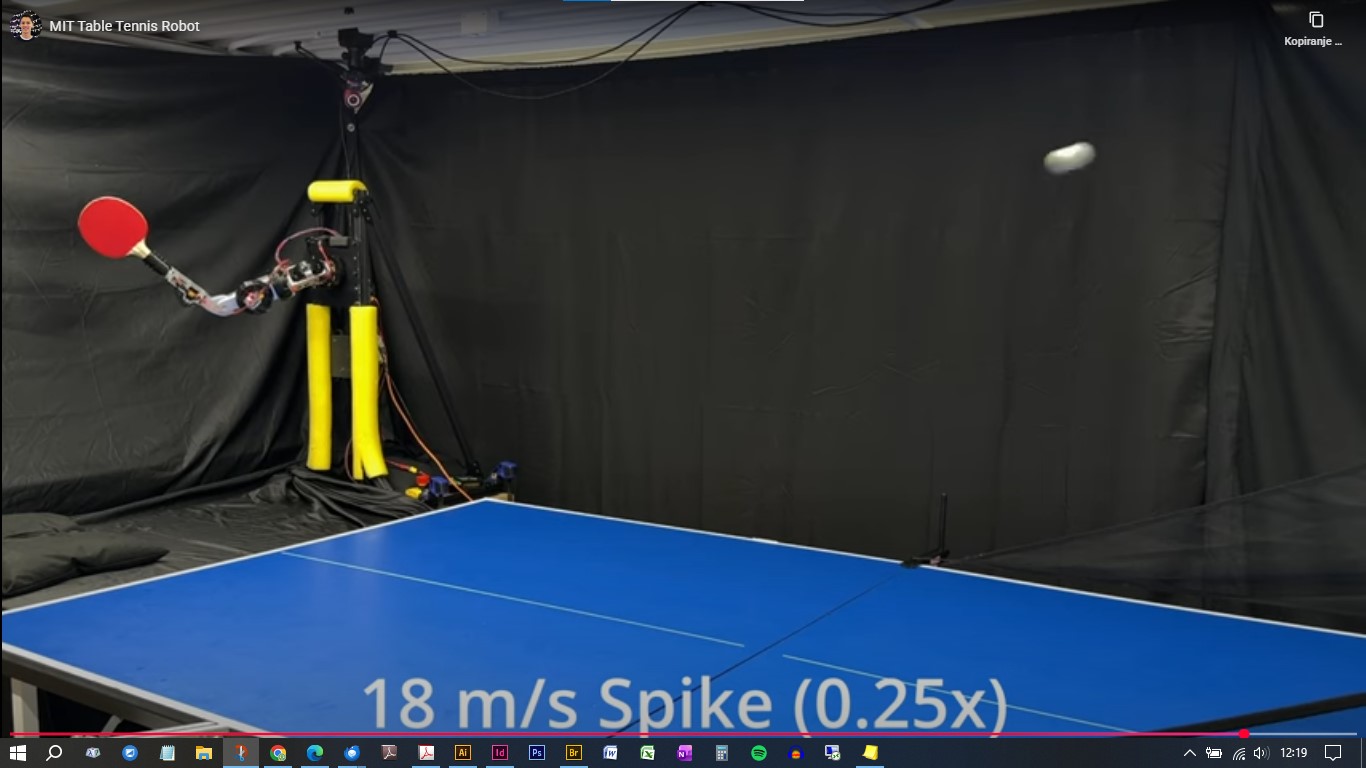
V svojem članku ekipa poroča, da je hitrost udarca robota, ali hitrost, s katero lopar udari žogo, v povprečju 11 metrov na sekundo. Znano je, da napredni človeški igralci vračajo žogice s hitrostjo med 21 in 25 metri na sekundo. Odkar so zapisali rezultate svojih prvotnih poskusov, so raziskovalci sistem dodatno izboljšali in zabeležili hitrosti udarca do 19 metrov na sekundo (približno 42 milj na uro).
„Eden od ciljev tega projekta je pokazati, da lahko dosežemo enako raven atletskih sposobnosti kot ljudje,“ pravi Nguyen. „In kar zadeva hitrost udarca, smo temu cilju že zelo, zelo blizu.“
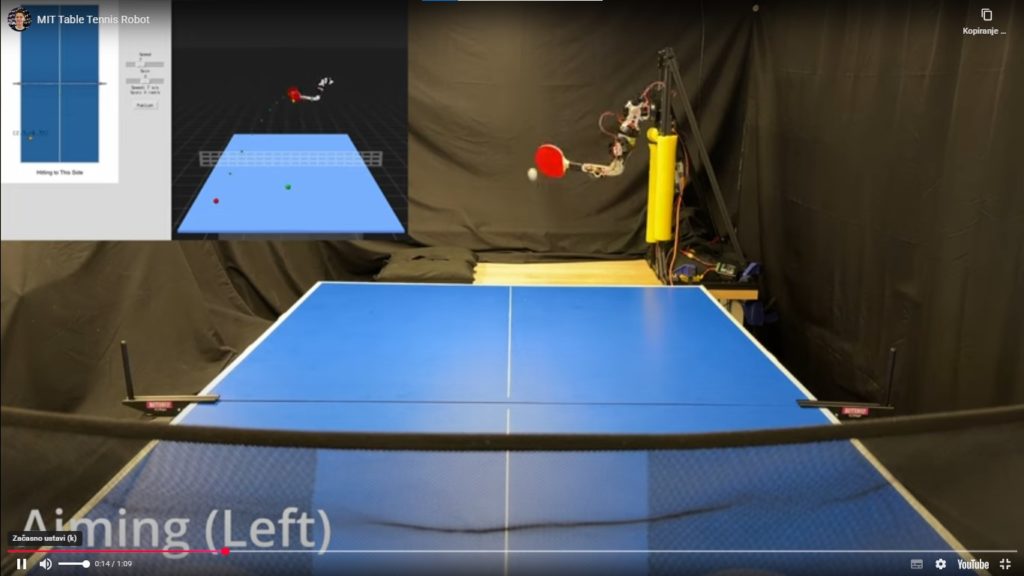
Njihovo nadaljnje delo je robotu omogočilo tudi ciljanje. Ekipa je v sistem vključila kontrolne algoritme, ki napovedujejo ne le kako, ampak tudi kam udariti prihajajočo žogo. Z najnovejšo različico lahko raziskovalci nastavijo ciljno lokacijo na mizi, robot pa bo žogo udaril na to lokacijo. Ker je robot pritrjen na mizo, ima omejeno mobilnost in doseg ter lahko večinoma vrača žogice, ki priletijo v polkrožno območje okoli srednje črte mize. V prihodnosti inženirji načrtujejo, da bodo robota namestili na portal ali platformo na kolesih, kar mu bo omogočilo, da bo pokril večji del mize in vračal več različnih udarcev.
„Pri namiznem tenisu je zelo pomembno predvideti vrtenje in pot žogice glede na to, kako jo je udaril nasprotnik, kar je informacija, ki je avtomatski izstreljevalec žogic ne more dati,“ pravi Cancio.„ Takšen robot bi lahko posnemal manevre, ki bi jih nasprotnik izvedel v igri, na način, ki bi pomagal ljudem igrati in se izboljšati.“
To raziskavo je delno podprl Inštitut za robotiko in umetno inteligenco.
Povzeto po:
https://news.mit.edu/2025/ping-pong-bot-returns-shots-high-speed-precision-0508

{kind=link}