Massachusetts Institute of Technology
Raziskovalci MIT CSAIL izboljšujejo natančnost robotov s prefinjenimi taktilnimi senzorji v dlaneh in okretnimi prsti, kar je podlaga za izboljšave v interakciji med človekom in robotom ter v protetični tehnologiji.
„Jedel ti bom iz roke“ je stavek, ki ga ne boste slišali od robota. Zakaj? Večina jih nima dlani.


Nova zasnova robotske roke, ki so jo razvili v Laboratoriju za računalništvo in umetno inteligenco (CSAIL) univerze MIT, pa je ponovno razmislila o pogosto spregledani dlani. Nova zasnova uporablja napredne senzorje za zelo občutljiv dotik, kar „ekstremitetam“ pomaga pri rokovanju s predmeti z večjo natančnostjo in občutljivostjo.
GelPalm ima v dlan vgrajen prilagodljiv senzor na osnovi gela, ki se zgleduje po mehki in deformabilni naravi človeških rok. Senzor uporablja posebno tehnologijo barvne osvetlitve, ki z rdečimi, zelenimi in modrimi LED-icami osvetljuje predmet, kamera pa zajema odseve. Ta mešanica ustvarja podrobne 3D-modele površin za natančne robotske interakcije.
In kaj bi bila dlan brez njenih priročnih prstov? Ekipa je razvila tudi nekaj robotskih falang, imenovanih ROMEO („RObotic Modular Endoskeleton Optical“), s prožnimi materiali in podobno tehnologijo zaznavanja kot pri dlani. Prsti imajo tako imenovano „pasivno skladnost“, ko se lahko robot naravno prilagaja silam, ne da bi za to potreboval motorje ali dodaten nadzor. To pa pripomore k večjemu cilju: povečati površino, ki je v stiku s predmeti, tako da jih je mogoče v celoti zaobjeti. Zasnove prstov, izdelane kot posamezne monolitne strukture s 3D-tiskanjem, so stroškovno učinkovita proizvodnja.
Poleg izboljšane spretnosti GelPalm omogoča varnejšo interakcijo s predmeti, kar je še posebej priročno za potencialne aplikacije, kot so sodelovanje med človekom in robotom, protetika ali robotske roke z zaznavanjem, podobnim človeškemu, za uporabo v biomedicini.
Številni dosedanji roboti so se običajno osredotočali na izboljšanje spretnosti prstov. Liunin pristop se osredotoča na oblikovanje človeku bolj podobnega, vsestranskega končnega efektorja, ki bolj naravno sodeluje s predmeti in opravlja širši spekter nalog.
„Navdih črpamo iz človeških rok, ki imajo toge kosti, obdane z mehkim, prožnim tkivom,“ pravi Sandra Q. Liu SM ‚20, PhD ‘24, glavna oblikovalka sistema GelPalm, ki je sistem razvila kot članica skupine CSAIL in doktorska študentka strojništva. „Z združevanjem togih struktur z deformabilnimi, prožnimi materiali lahko bolje dosežemo enako prilagodljivost, kot jo imajo naše spretne roke. Glavna prednost je, da ne potrebujemo dodatnih motorjev ali mehanizmov za sprožitev deformacije dlani – inherentna podvrženost ji omogoča, da se samodejno prilagaja predmetom, tako kot to spretno počnejo naše človeške dlani.“


Raziskovalci so preizkusili obliko dlani. Liu je primerjala taktilno zaznavanje dveh različnih sistemov osvetlitve – modrih in belih LED-ic – vgrajenih v prste ROMEO. „Oba sta dala podobno visokokakovostne 3D taktilne rekonstrukcije pri pritiskanju predmetov v gelske površine,“ pravi Liu.
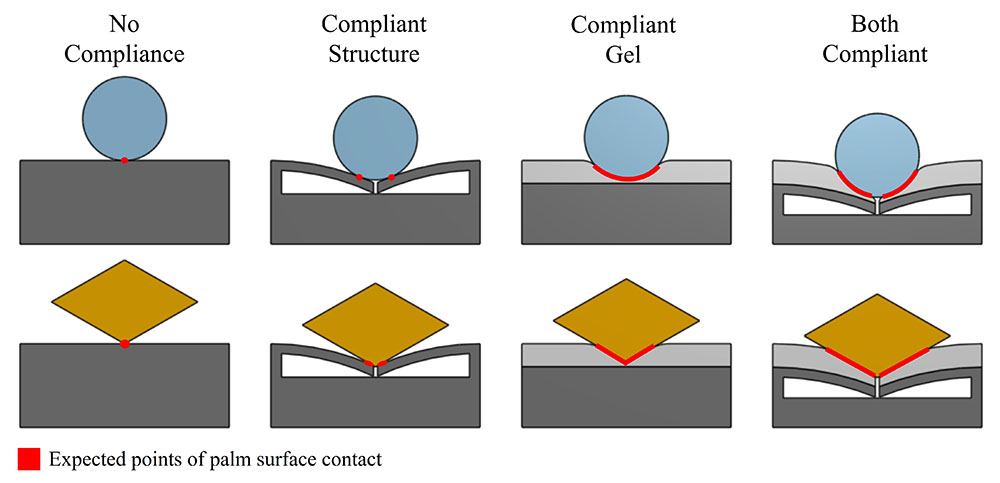
Po njenih besedah pa je bil ključni poskus preverjanje, kako dobro lahko različne konfiguracije dlani zaobjamejo in stabilno držijo predmete. Ekipa se je lotila praktičnega dela, tako da je plastične oblike dobesedno premazala z barvo in jih pritisnila na štiri vrste dlani: toge, strukturno skladne, gelske in dvojno skladne. „Vizualno in z analizo stikov s pobarvano površino je bilo jasno, da je tako strukturna kot materialna skladnost dlani zagotovila bistveno boljši oprijem kot drugi,“ pravi Liu. „To je eleganten način za povečanje vloge dlani pri doseganju stabilnih prijemov.“
Ena od pomembnih omejitev je izziv, kako v dlan vgraditi dovolj senzorične tehnologije, ne da bi bila ta prevelika ali preveč zapletena. Ekipa pravi, da uporaba taktilnih senzorjev, ki temeljijo na kameri, povzroča težave z velikostjo in prilagodljivostjo, saj trenutna tehnologija ne omogoča enostavnega pokrivanja brez kompromisov pri oblikovanju in funkcionalnosti. Reševanje tega problema bi lahko pomenilo razvoj prožnejših materialov za zrcala in izboljšanje integracije senzorjev, da se ohrani funkcionalnost brez ogrožanja praktične uporabnosti.
„Pri razvoju večine robotskih rok je dlan skoraj povsem spregledana,“ pravi docent Matei Ciocarlie z Univerze Columbia, ki ni sodeloval pri pripravi članka. „To delo je izjemno, saj predstavlja namensko zasnovano in uporabno dlan, ki združuje dve ključni lastnosti, artikulacijo in zaznavanje, medtem ko večina robotskih dlani nima obeh. Človeška dlan je hkrati subtilno artikulirana in zelo občutljiva, to delo pa je pomembna inovacija v tej smeri.“
„Upam, da se bomo v naslednjih petih do desetih letih približali naprednejšim robotskim rokam, ki bodo združevale mehke in toge elemente z občutljivostjo za otip. To je zapleteno področje brez jasnega soglasja o najboljši zasnovi roke, zato je to delo še posebej vznemirljivo,“ pravi Liu. „Pri razvoju izdelka GelPalm in prstov ROMEO sem se osredotočila na modularnost in prenosljivost, da bi spodbudila široko paleto modelov. Če je ta tehnologija poceni in enostavna za izdelavo, lahko več ljudi uvaja inovacije in raziskuje. Ker sem le en laboratorij in ena oseba na tem obsežnem področju, sanjam, da bi deljenje tega znanja lahko spodbudilo napredek in navdihnilo druge.“
Ted Adelson, profesor znanosti o vidu na John and Dorothy Wilson na oddelku za možgane in kognitivne znanosti ter član skupine CSAIL, je glavni avtor članka, v katerem opisuje to delo [1]. Raziskavo so delno podprli Toyotin raziskovalni inštitut, Amazon Science Hub in projekt SINTEF BIFROST. Liu je raziskavo predstavila na mednarodni konferenci o robotiki in avtomatizaciji (ICRA) v začetku julija 2024.
Viri:
1: https://arxiv.org/pdf/2404.08227

{kind=link}