![]()
Siemens d.o.o.
Pripravil: Andrej Lazovič
Že nekaj časa so pri Siemensu dostopni tehnološki krmilniki S7-1500 T(F), ki omogočajo napredne funkcije sinhronizacije dveh ali večih medsebojno povezanih osi.
Te funkcije so na primer absolutni gearing, camming – sinhronizacija dveh osi po f(x). Od TIA Portal V15 naprej je na voljo tudi uporaba kinematike, ki omogoča koordinirano gibanje več medsebojno mehansko povezanih osi. V namen poenostavitve uporabe in za lažje delo z manipulatorji so bile s strani Siemensa izdelane knjižnice, ki prinašajo določene funkcionalnosti iz sveta robotov na tehnološke krmilne, kot so na primer učenje »teaching« ali gibanje po poti definirani z G-kodo, hkrati pa nudijo že predizdelano HMI vizualizacijo za hitrejšo integracijo. Povezava do celotnega seznama knjižnic, kjer so dostopni tudi video posnetki za prikaz delovanja: https://support.industry.siemens.com/cs/ww/en/view/109757198
Kinematics Control (LKinCtrl)
Knjižnica Kinematics Control (LKinCtrl), omogoča uporabniku enostavno upravljanje kinematike.
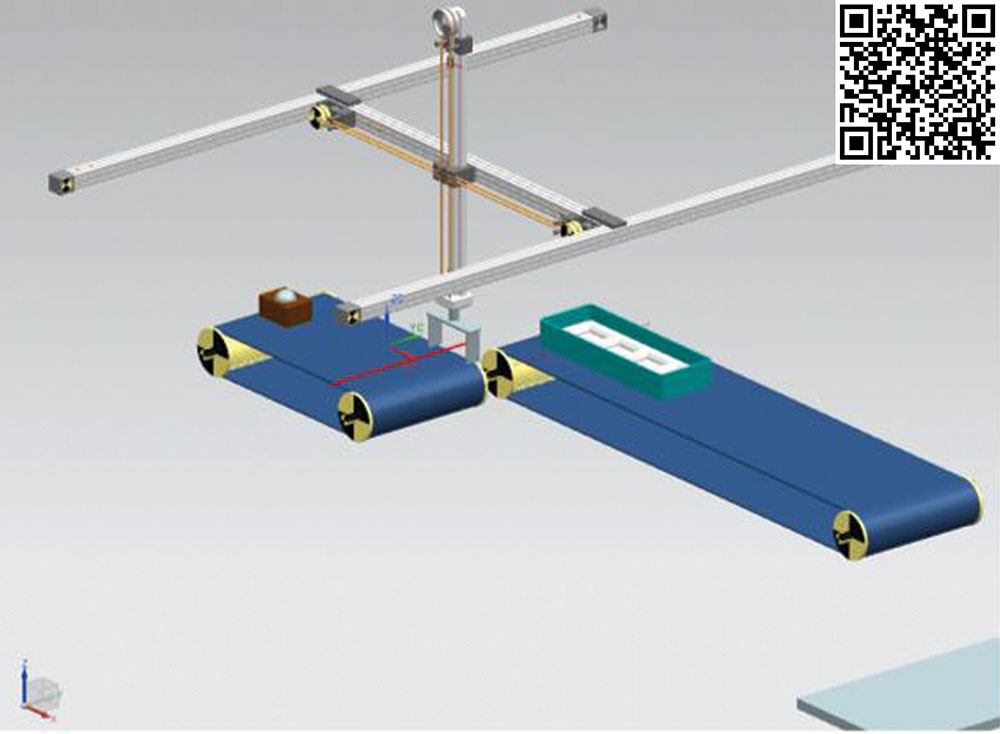
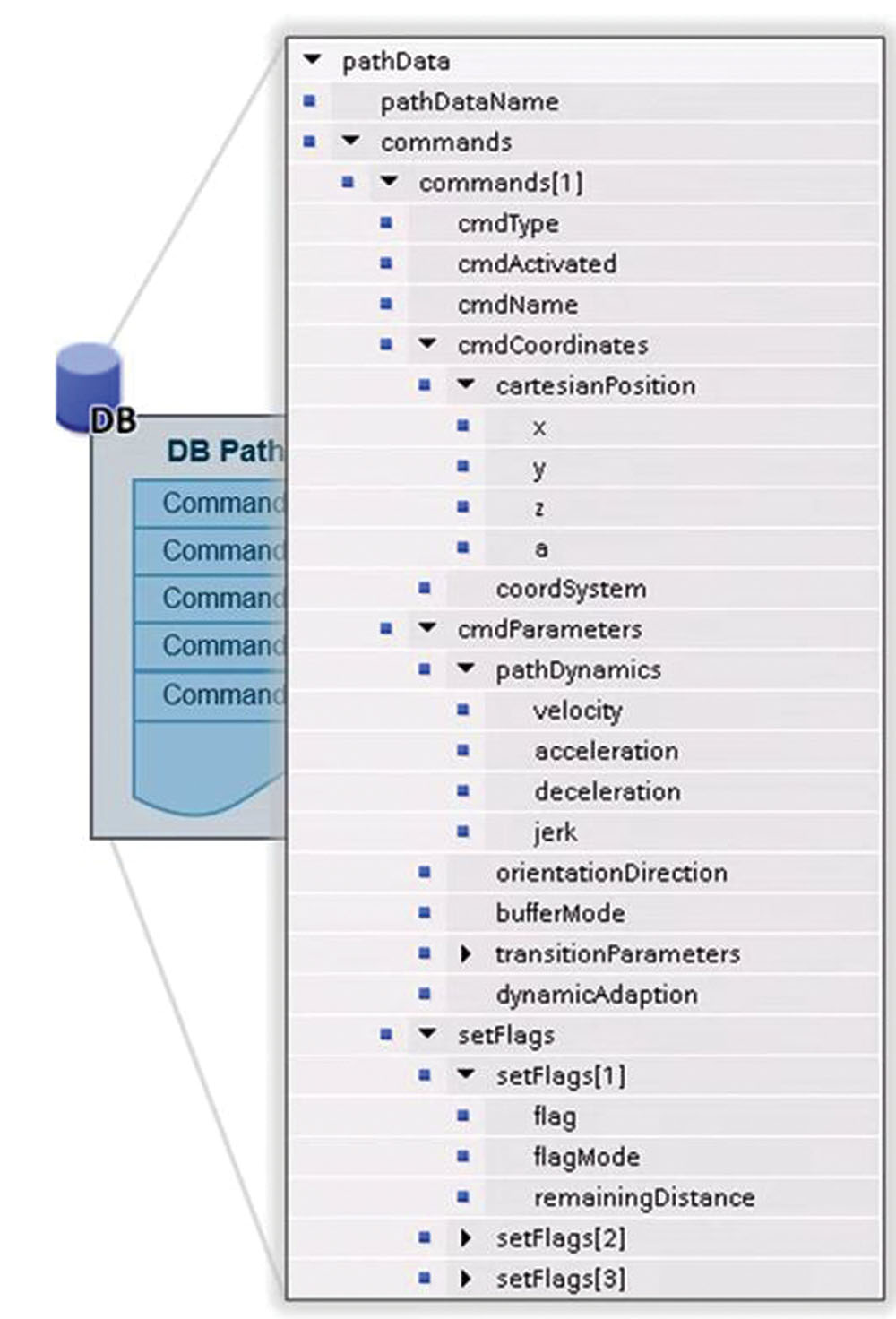

Namesto pisanja programa funkcijskih blokov za vsako točko, uporabnik v programu uporabi samo en osrednji funkcijski blok (FB) MC_MovePath, ki nadzoruje tehnološki objekt (TO) Kinematics. Informacije o poti so shranjene v obliki data bloka z imenom PathData. PathData blok vsebuje seznam ukazov. Podprte so različne vrste ukazov gibanja, kot so linearni in krožni, absolutni in relativni gibi, vključno s prehodi poti in časi za zakasnitev izvajanja. Pot gibanja je mogoče ustvariti, samo z vnosi v data blok preko inženirskega orodja TIA Portal ali preko HMI vmesnika (slika 1 in slika 2). V namen izbire med večjim številom poti gibanja je integrirana tudi funkcija LKinCtrl_MC_PathSelect, ki omogoča, izbiro želene poti gibanja v kolikor je teh poti več (na primer za nanos tesnila na več različnih produktov).
Aktivacija orodja se vrši preko zastavic oz. flag ukaza, ki je zapisan znotraj data bloka PathData in se izvede na ustreznih točkah med gibanjem manipulatorja. Flag pa ima določene tudi ustrezne lastnosti (flagMode), ki mu določa način izvajanja funkcije za ustrezno delovanje orodja, to je lahko od začetka do konca poti (na primer kadar uporabljamo za nanos lepila). Lahko izberemo način na preostalo razdaljo (on remaining distance), kjer se aktivira vakuumski vlek na določeni razdalji pred koncem, da razvije optimalni vakuum. Opcija za pričetek ali konec delovanja zastavice oz. flaga je lahko tudi zunanji signal tak primer je, če odložimo produkt na določeno mesto nam digitalni signal od svetlobne celice javi, da je produkt odložen na ustrezno mesto in da lahko odpremo prijemalo.
Kinematics Manual Control (LKinMCtrl)
Preko HMI vmesnika je mogoče izvajati tudi učenje »teaching« kjer lahko robota oz. manipulator naučimo gibanja po ustrezni poti tako, da ga ročno zapeljemo na želeno pozicijo in shranimo ustrezno točko. V ta namen je knjižnici LKinCtrl dodana še knjižnica Kinematics Manual Control (LKinMCtrl), ki omogoča ročno upravljanje premikov z manipulatorjem in vklapljanje posameznih con v katerih se manipulator giblje. Lahko pa s pomočjo vizualizacije za HMI spreminjamo parametre velikosti orodij, dinamike hitrosti gibanja ali pa spreminjamo nastavitve koordinatnega sistema, kar je zelo uporabna funkcija, če je potrebno izvesti zamike zaredi spremembe postavitve produkta.
S7-1500T Kinematics Language (LKinLang)
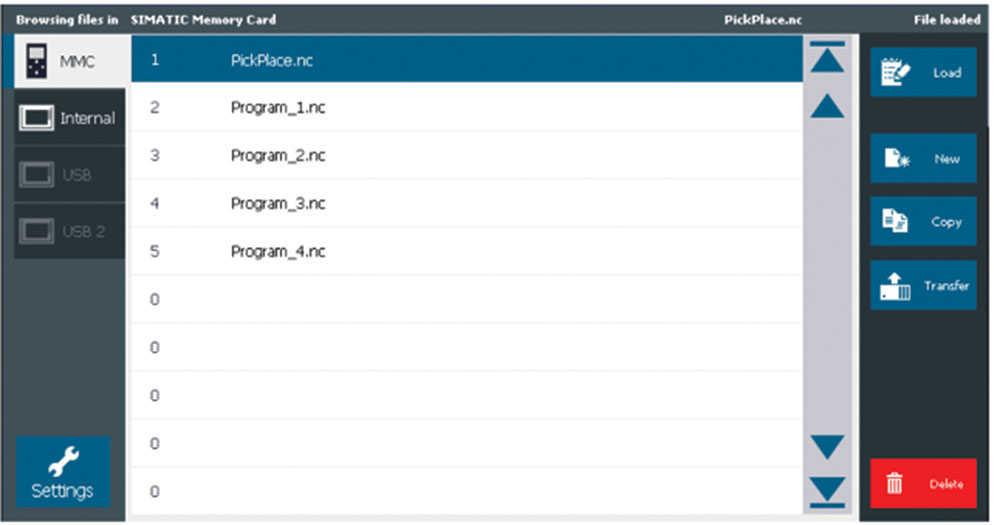
Knjižnica LKinLang omogoča tekstovno programiranje kinematike, definiranje tekstovnih ukazov kot je na primer G-koda, ki se jo izvozi iz CAD orodja. Z razliko od knjižnice LK in Ctrl omogoča prenos G-kode direktno na krmilnik med njegovim delovanjem. Prenos se lahko izvede preko HMI vmesnika z USB Ključkom ali SD kartico. Če je uporabljen WinCC RT Advanced je za shranjevanje določena specifična mapa na disku. Uporabit pa je možno tudi SIMATIC FileTrasfer program, ki prenese iz Windows okolja datoteko z G-kodo direktno na krmilnik.
Zaradi večjih potreb po pomniku je za knjižnico LKinLang priporoča vsaj krmilnik S7-1515T(F) ali 1504D TF Drive controller.
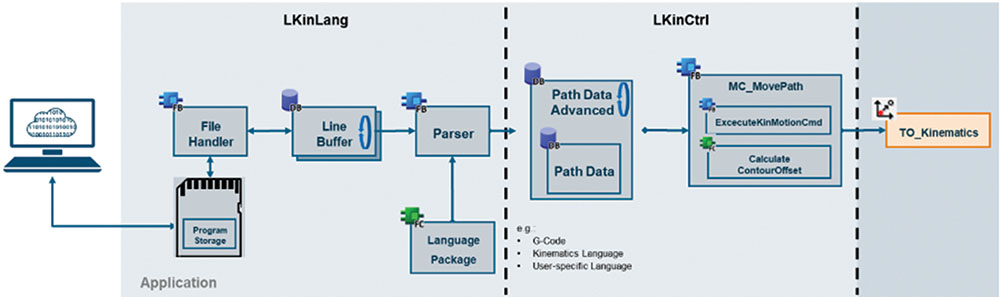
Za delovanje knjižnice se na krmilniku uporablja FB FileHandler, ki omogoča prenos datotek v ciklični buffer (DB Line Buffer), kjer se znotraj FB Perser izvede prevajanje G-Kode glede na jezikovni paket (Language Package) in se zapiše v PathData data blok. Nadaljnji del je sestavljen iz FB MC_MovePath, ki izvaja zapisane ukaze iz bloka PathData in je sestavni del knjižnice Kinematics Control (LKinCtrl).
Preko HMI vmesnika je mogoče urejanje G-kode, uporabljati je možno tudi matematične funkcije za programiranje in izdelavo poteka programa z vejami, zankami in podprogrami. Knjižnica ravno tako omogoča konfiguriranje con s tekstualnim komandami, menjave med OCS sistemi, tekstualno aktiviranje/deaktiviranje orodij in upravljanje orodij preko HMI vmesnika.
S7-1500T Kinematics AddOn
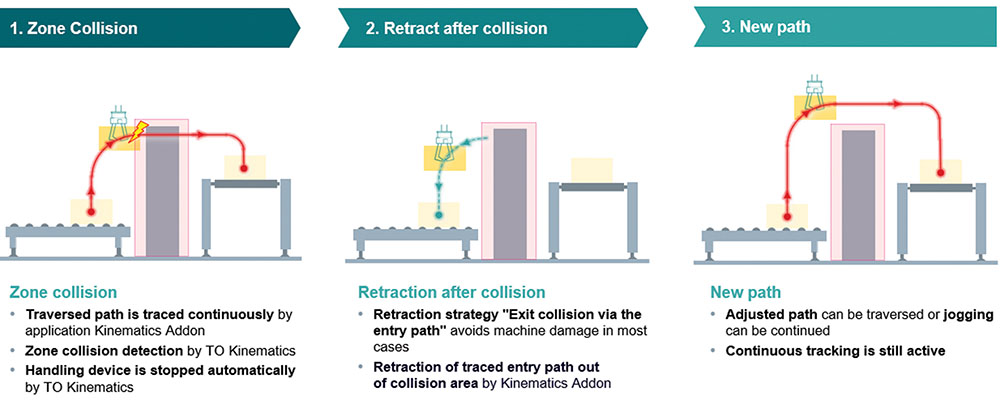
Namen knjižnice Kinematics AddOn je izvesti ustrezen izogib v primeru zaznane kolizije s cono, kjer bi lahko prišlo do trka. V tem primeru se manipulator vrne na začetno pozicijo ali na želeno definirano točko.
S7-1500T Product Register
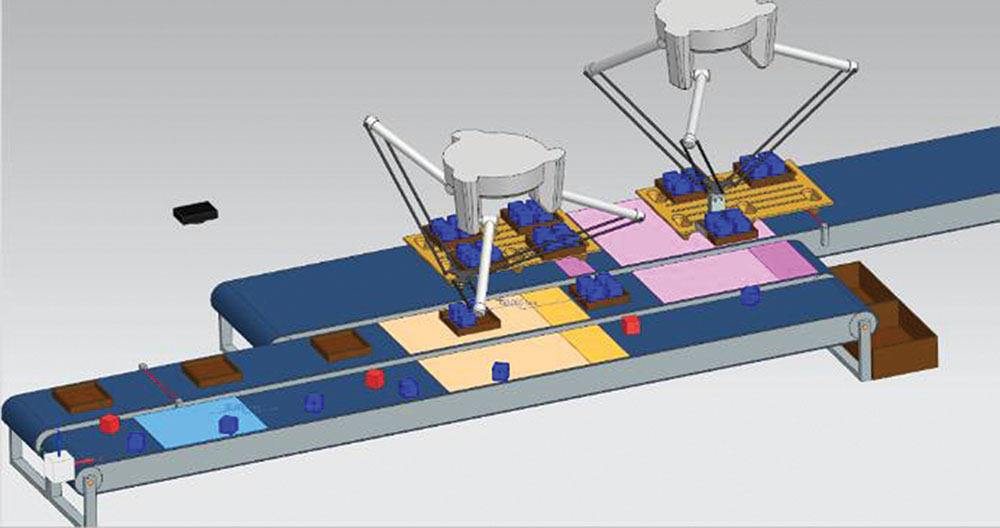
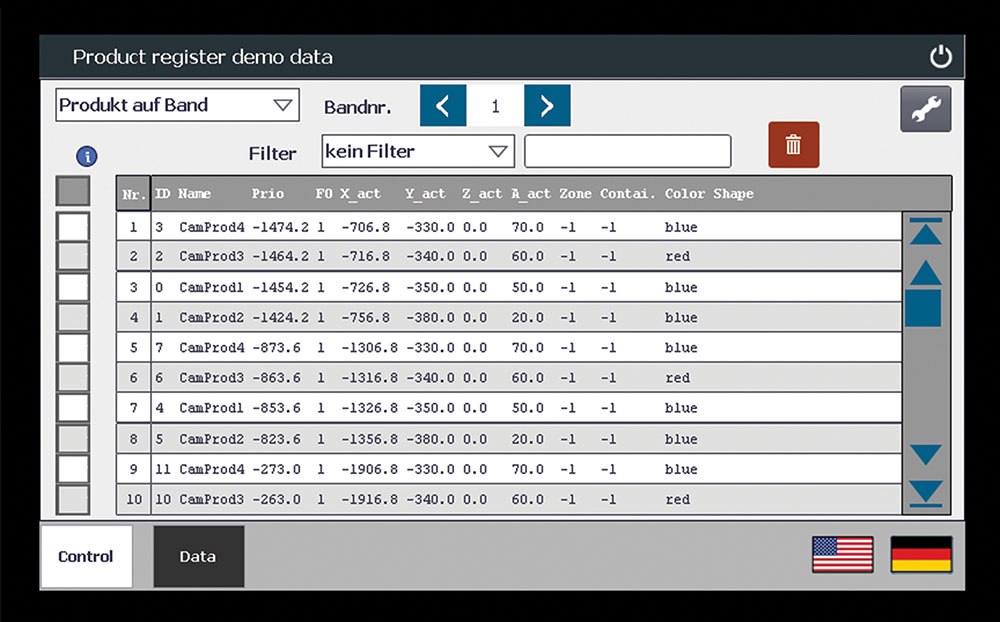
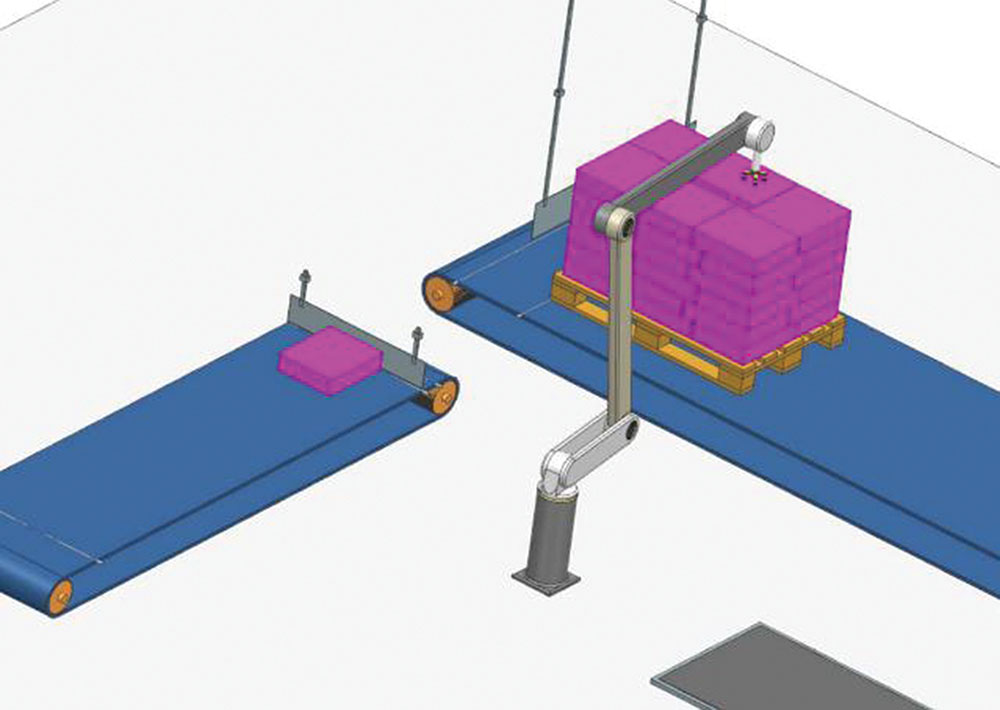
Glavna lastnost knjižnice Product Register (LProdReg) je, da omogoča detekcijo predmetov na tekočem traku preko senzorjev ali kamer. Ustrezni funkcijski bloki za upravljanje manipulatorja si nenehno izmenjujejo informacije s centralnim glavnim funkcijskim blokom LProdReg_ProductDataBaseManager, ki skrbi za vodenje registra. V registru so zbrani vsi podatki o izdelku ali pladnju oz. paleti, ki se giblje na tekočem traku in nam omogoča, da manipulator točno ve kje se nahaja produkt na tekočem traku, posledično pa nam poznavanje pozicije omogoča, da lahko manipulator opravi manipulacijo z izdelkom (lahko je to enostaven Pick & Place gib) med gibanjem po tekočem traku. Na Siemensovi spletni strani je dostopen primer digitalnega dvojčka, kjer kamera najprej zazna ali gre za slab oz. dober kos in mu zabeleži pozicijo na tekočem traku (za beleženje pozicije je mogoče uporabit tudi na primer svetlobno celico namesto kamere). Pozicijo produkta lahko krmilnik spremlja, ker ima tekoči trak enkoder in na ta način vedno ve na kateri poziciji se produkt nahaja na tekočem traku. Ko pride produkt do manipulatorja, le-ta dober kos prestavi na pladenj, ki se giblje na drugem tekočem traku. Razporeditev na pladnje oz. palete lahko preko HMI vmesnika poljubno spreminjamo glede na želeno število kosov na pladnju ali paleti oz. imamo možnost izvajanja uporabniško specifičnih razvrščanj (primer razvrščanje na pladenj v poljubni obliki).
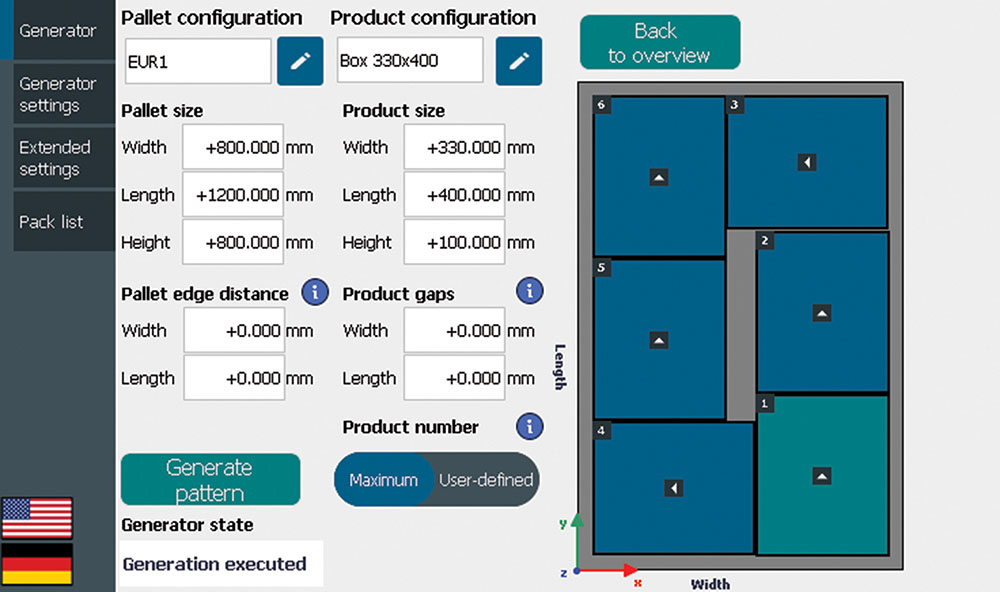
SIMATIC Palletize Pattern Generator (LPallPatt)
Knjižnica SIMATIC LPallPatt nudi funkcionalnosti za ustvarjanje vzorcev postavljanja produktov na palete za kvadraste izdelke. Kot rezultat generiranja vzorca je zagotovljena tabela točk, ki določa postavitev izdelkov na palete različnih dimenzij ali v zabojnike. Pri polaganju lahko izbiramo med različnimi vzorci polaganja in med različnimi zamiki, ki jih lahko zlagamo z zamiki po različnih nivojih da dosežemo boljšo stabilnost na paleti. Uporabnik lahko preko HMI vmesnika določi ustrezen primeren vzorec polaganja na paleto.
Siemens d.o.o.
Letališka cesta 29c
1000 Ljubljana
https://www.siemens.si

{kind=link}