![]()
Massachusetts Institute of Technology
Raziskovalci so razvili tehniko, ki robotu omogoča, da se nauči nove naloge pobiranja in postavljanja z le nekaj demonstracijami človeka.
Ob prilivu naročil za e-trgovino skladiščni robot pobere skodelice s police in jih pospravi v škatle za pošiljanje. Vse poteka gladko, dokler v skladišču ne pride do spremembe in mora robot zdaj zgrabiti višje in ožje skodelice, ki so shranjene z glavo navzdol.
Pri reprogramiranju robota je treba ročno označiti na tisoče slik, ki mu pokažejo, kako prijeti te nove skodelice, nato pa sistem znova usposobiti.
Z novo tehniko, ki so jo razvili raziskovalci MIT, pa bi za reprogramiranje robota potrebovali le nekaj demonstracij človeka. Ta metoda strojnega učenja omogoča, da robot dvigne in postavi še nikoli videne predmete, ki so v naključnih položajih, s katerimi se še nikoli ni srečal. V 10 do 15 minutah bi bil robot pripravljen na novo nalogo pobiranja in postavljanja.
Tehnika uporablja nevronsko mrežo, ki je posebej zasnovana za rekonstrukcijo oblik 3D predmetov. Z le nekaj prikazi sistem uporabi to, kar se je nevronska mreža naučila o 3D geometriji, da zajame nove predmete, ki so podobni tistim v prikazih.
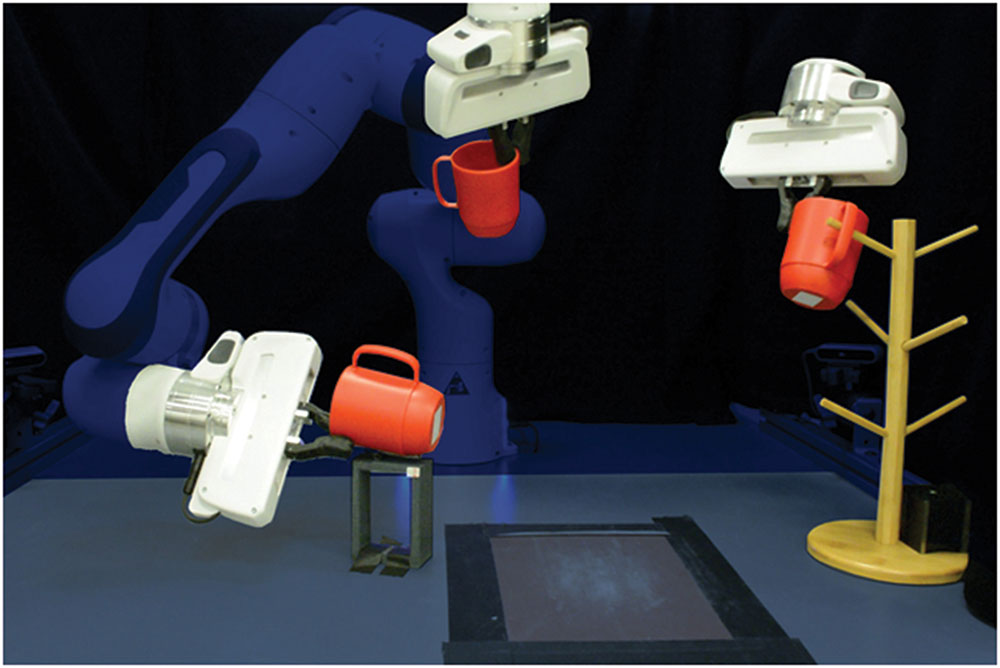
V simulacijah in z uporabo prave robotske roke so raziskovalci pokazali, da lahko njihov sistem učinkovito manipulira z nikoli prej videnimi vrči, skodelicami in steklenicami, razporejenimi v naključnih položajih, pri čemer so za učenje robota uporabili le 10 demonstracij.
“Naš glavni prispevek je splošna zmožnost za veliko učinkovitejše zagotavljanje novih spretnosti robotom, ki morajo delovati v bolj nestrukturiranih okoljih, kjer je lahko veliko variabilnosti. Koncept posploševanja s konstrukcijo je fascinantna zmožnost, saj je ta problem običajno veliko težji,” pravi Anthony Simeonov, podiplomski študent elektrotehnike in računalništva (EECS) in soavtor članka.
Simeonov je članek napisal s soavtorjem Yilunom Duom, podiplomskim študentom EECS, Andreo Tagliasacchijem, zaposlenim raziskovalcem pri Google Brain, Joshuo B. Tenenbaumom, Paulom E. Newtonom, profesorjem za karierni razvoj na področju kognitivne znanosti in računalništva na oddelku za možgane in kognitivne znanosti ter članom laboratorija za računalništvo in umetno inteligenco (CSAIL); Albertom Rodriguezom, izrednim profesorjem razreda 1957 na oddelku za strojništvo; in starejšima avtorjema Pulkitom Agrawalom, profesorjem na CSAIL, in Vincentom Sitzmannom, novim docentom na oddelku EECS. Raziskava bo predstavljena na mednarodni konferenci o robotiki in avtomatizaciji.
Robot je lahko usposobljen za dvigovanje določenega predmeta, vendar če ta predmet leži na boku (morda je padel), robot to vidi kot popolnoma nov scenarij. To je eden od razlogov, zakaj sistemi strojnega učenja tako težko posplošijo na nove usmeritve predmetov.
Da bi premagali ta izziv, so raziskovalci ustvarili novo vrsto modela nevronske mreže, nevronsko opisno polje (NDF), ki se uči 3D geometrije razreda predmetov. Model izračuna geometrijsko predstavitev za določen predmet z uporabo 3D oblaka točk, ki je niz podatkovnih točk ali koordinat v treh razsežnostih. Podatkovne točke se lahko pridobijo iz globinske kamere, ki zagotavlja informacije o razdalji med predmetom in točko gledanja. Čeprav je bilo omrežje usposobljeno v simulaciji na velikem naboru podatkov sintetičnih 3D-oblik, ga je mogoče neposredno uporabiti za predmete v resničnem svetu.
“Kako učinkovito lahko robote naučimo novih manipulacijskih spretnosti, je odvisno od njihove sposobnosti posploševanja na podlagi le nekaj demonstracij. To delo kaže, kako lahko robot robustno prenese demonstracije pobiranja ali postavljanja predmeta na prej nevidene predmete,” pravi Dieter Fox, profesor računalništva in inženirstva na Univerzi v Washingtonu, ki ni sodeloval pri tej raziskavi. “Ta raziskava izkorišča nedavni napredek na področju globokega učenja za nevronske predstavitve predmetov in uvaja več zelo pametnih inovacij, ki so zelo primerne za učenje posnemanja pri robotski manipulaciji. Poskusi v resničnem svetu so izjemno impresivni in pričakujem, da bodo številni raziskovalci gradili na teh rezultatih.”
To delo delno podpirajo Agencija za napredne obrambne raziskovalne projekte, Singapurska agencija za obrambno znanost in tehnologijo ter Nacionalna znanstvena fundacija.
Povzeto po:
https://news.mit.edu/2022/teach-pick-robots-new-task-0425

{kind=link}