![]()
Inženirja MIT sta razvila robotsko prijemalo z obilnimi senzoričnimi sposobnostmi.
Predstave o velikem kovinskem robotu, ki govori monotono in se premika z okornimi, premišljenimi koraki, se je težko znebiti. Vendar imajo strokovnjaki na področju mehke robotike v mislih povsem drugačno podobo – avtonomne naprave, sestavljene iz podajnih delov, ki so nežni na otip in bolj spominjajo na človeške prste kot na R2-D2 ali Robbyja Robota.
S tem modelom se zdaj ukvarja profesor Edward Adelson in njegova skupina za zaznavanje v laboratoriju za računalništvo in umetno inteligenco MIT (CSAIL). V nedavnem projektu sta Adelson in Sandra Liu – doktorska študentka strojništva na CSAIL – razvila robotsko prijemalo z novimi prsti “GelSight Fin Ray”, ki je podobno kot človeška roka dovolj prožno za manipulacijo s predmeti. Liu in Adelson sta svoje prijemalo opremila s senzorji za dotik, ki lahko dosežejo ali celo presežejo občutljivost človeške kože, kar to delo razlikuje od drugih prizadevanj na tem področju.
Njihovo delo je bilo predstavljeno na 5. mednarodni konferenci o mehki robotiki IEEE 2022.
Ribja hbrtna plavut je postala priljubljen element mehke robotike zaradi odkritja nemškega biologa Leifa Knieseja leta 1997. Opazil je, da se ob pritisku s prstom na hrbtno ribjo plavut le-ta upogne proti uporabljeni sili in skoraj objame njegov prst, namesto da bi se nagnila stran. Ta zasnova je postala priljubljena, vendar ji manjka taktilna občutljivost. “Je vsestranski, saj se lahko pasivno prilagaja različnim oblikam in tako zajame različne predmete,” pojasnjuje Liu. “Da pa bi presegli to, kar so že naredili drugi na tem področju, smo se odločili, da v naš prijemalnik vključimo taktilni senzor.”
Prijemalo je sestavljeno iz dveh gibljivih prstov z rebri, ki se prilagodita obliki predmeta, s katerim prideta v stik. Sama prsta sta sestavljena iz prožnih plastičnih materialov, izdelanih na 3D-tiskalniku, kar je na tem področju dokaj standardno. Vendar imajo prsti, ki se običajno uporabljajo v mehkih robotskih prijemalih, podporne prečne letve, ki potekajo po dolžini njihove notranjosti, medtem ko sta Liu in Adelson izdolbla notranji del, da sta lahko ustvarila prostor za kamero in druge senzorične komponente.
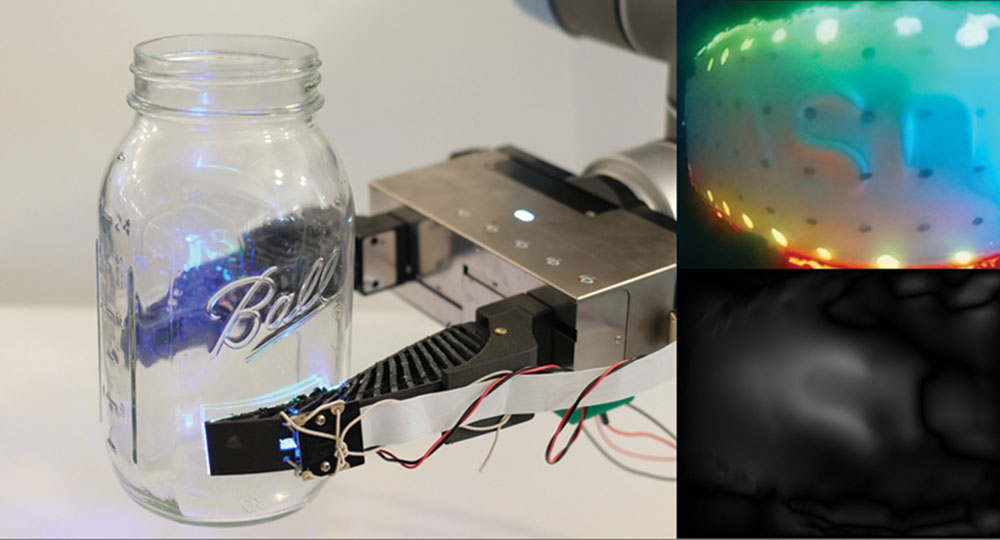
Kamera je nameščena na poltrdno podlago na enem koncu izdolbene votline, ki jo osvetljujejo LED-ice. Kamera je obrnjena proti plasti “senzoričnih” blazinic, sestavljenih iz silikonskega gela (znanega kot “GelSight”), ki je prilepljen na tanko plast akrilnega materiala. Akrilna plast pa je pritrjena na plastični del prsta na nasprotnem koncu notranje votline. Ko se prst dotakne predmeta, se nemoteno zvije okoli predmeta in se zlije z njegovimi obrisi.
Z natančnim določanjem deformacije silikonskih in akrilnih plošč med to interakcijo lahko kamera in spremljajoči računalniški algoritmi ocenijo splošno obliko predmeta, hrapavost njegove površine, njegovo orientacijo v prostoru ter silo, ki jo uporablja vsak prst (in se prenaša nanj).
Liu in Adelson sta svoje prijemalo preizkusila v poskusu, v katerem je bil “zaznavan” le eden od dveh prstov. Njuna naprava je uspešno obvladovala predmete, kot so mini izvijač, plastična jagoda, akrilna barvna cevka, kozarec Ball Mason in vinski kozarec. Medtem ko je prijemalo na primer držalo umetno jagodo, je notranji senzor zaznal “semena” na njeni površini. Prsti so prijeli tubo z barvo, ne da bi jo stisnili tako močno, da bi jo prelomili in iztisnili njeno vsebino.
Stekleni predmeti so zaradi loma svetlobe izziv za robote, ki temeljijo na vidu. Taktilni senzorji so odporni na takšno optično dvoumnost. Ko je prijemalo dvignilo vinski kozarec, je začutilo usmerjenost peclja in se lahko prepričalo, da je kozarec usmerjen naravnost navzgor, preden ga je počasi spustilo. Ko se je podstavek dotaknil mizne plošče, je gelska blazinica zaznala stik. Do pravilne postavitve je prišlo v sedmih od desetih poskusov in na srečo se med snemanjem tega poskusa ni poškodoval noben kozarec.
Taktilno zaznavanje v njihovem pristopu temelji na poceni sestavnih delih: kameri, gelu in LED-icah. Liu upa, da bo s tehnologijo, kot je GelSight, “mogoče izdelati senzorje, ki bodo praktični in cenovno dostopni”. To je vsaj eden od ciljev, h kateremu stremijo ona in drugi v laboratoriju.
Sredstva za to delo sta zagotovila Toyotin raziskovalni inštitut in Urad za pomorske raziskave ZDA.
Povzeto po:
https://news.mit.edu/2022/flexible-way-grab-items-feeling-0415

{kind=link}